
[TOC]
# 简介
信号量广泛用于进程或线程间的同步和互斥,信号量本质上是一个非负的整数计数器,它被用来控制对公共资源的访问。
编程时可根据操作信号量值的结果判断是否对公共资源具有访问的权限,当信号量值大于 0 时,则可以访问,否则将阻塞。
PV 原语是对信号量的操作,一次 P 操作使信号量减1,一次 V 操作使信号量加1。
信号量主要用于进程或线程间的同步和互斥这两种典型情况。
信号量数据类型为:sem\_t。
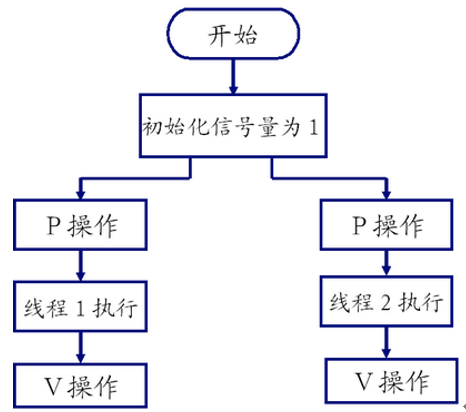
信号量用于互斥
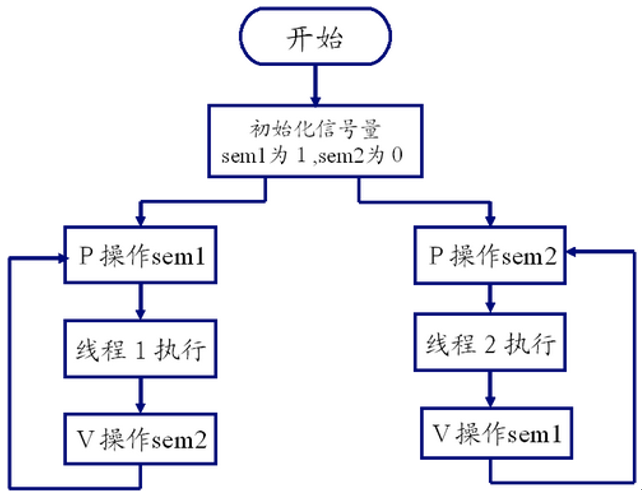
信号量用于同步:
# sem_init函数
初始化信号量:
~~~
#include <semaphore.h>
int sem_init(sem_t *sem, int pshared, unsigned int value);
功能:
创建一个信号量并初始化它的值。一个无名信号量在被使用前必须先初始化。
参数:
sem:信号量的地址。
pshared:等于 0,信号量在线程间共享(常用);不等于0,信号量在进程间共享。
value:信号量的初始值。
返回值:
成功:0
失败: - 1
~~~
# sem_destroy函数
销毁信号量:
~~~
#include <semaphore.h>
int sem_destroy(sem_t *sem);
功能:
删除 sem 标识的信号量。
参数:
sem:信号量地址。
返回值:
成功:0
失败: - 1
~~~
# 信号量P操作(减1)
~~~
#include <semaphore.h>
int sem_wait(sem_t *sem);
功能:
将信号量的值减 1。操作前,先检查信号量(sem)的值是否为 0,若信号量为 0,此函数会阻塞,直到信号量大于 0 时才进行减 1 操作。
参数:
sem:信号量的地址。
返回值:
成功:0
失败: - 1
int sem_trywait(sem_t *sem);
* 以非阻塞的方式来对信号量进行减 1 操作。
* 若操作前,信号量的值等于 0,则对信号量的操作失败,函数立即返回。
int sem_timedwait(sem_t *sem, const struct timespec *abs_timeout);
* 限时尝试将信号量的值减 1
* abs_timeout:绝对时间
~~~
abs_timeout补充说明:
~~~
struct timespec {
time_t tv_sec; /* seconds */ // 秒
long tv_nsec; /* nanosecondes*/ // 纳秒
}
time_t cur = time(NULL); //获取当前时间。
struct timespec t; //定义timespec 结构体变量t
t.tv_sec = cur + 1; // 定时1秒
sem_timedwait(&cond, &t);
~~~
# 信号量V操作(加1)
~~~
#include <semaphore.h>
int sem_post(sem_t *sem);
功能:
将信号量的值加 1 并发出信号唤醒等待线程(sem_wait())。
参数:
sem:信号量的地址。
返回值:
成功:0
失败:-1
~~~
# 获取信号量的值
~~~
#include <semaphore.h>
int sem_getvalue(sem_t *sem, int *sval);
功能:
获取 sem 标识的信号量的值,保存在 sval 中。
参数:
sem:信号量地址。
sval:保存信号量值的地址。
返回值:
成功:0
失败:-1
~~~
# 例子
~~~
sem_t sem; //信号量
void printer(char *str)
{
sem_wait(&sem);//减一
while (*str)
{
putchar(*str);
fflush(stdout);
str++;
sleep(1);
}
printf("\n");
sem_post(&sem);//加一
}
void *thread_fun1(void *arg)
{
char *str1 = "hello";
printer(str1);
}
void *thread_fun2(void *arg)
{
char *str2 = "world";
printer(str2);
}
int main(void)
{
pthread_t tid1, tid2;
sem_init(&sem, 0, 1); //初始化信号量,初始值为 1
//创建 2 个线程
pthread_create(&tid1, NULL, thread_fun1, NULL);
pthread_create(&tid2, NULL, thread_fun2, NULL);
//等待线程结束,回收其资源
pthread_join(tid1, NULL);
pthread_join(tid2, NULL);
sem_destroy(&sem); //销毁信号量
return 0;
}
~~~
# 扩展
自旋锁
> int pthread\_spin\_destroy(pthread\_spinlock\_t \*lock);
>
> int pthread\_spin\_init(pthread\_spinlock\_t \*lock, int pshared);
屏障
信号量:
> int semget(key\_t key, int nsems, int semflg);
- c语言
- 基础知识
- 变量和常量
- 宏定义和预处理
- 随机数
- register变量
- errno全局变量
- 静态变量
- 类型
- 数组
- 类型转换
- vs中c4996错误
- 数据类型和长度
- 二进制数,八进制数和十六进制数
- 位域
- typedef定义类型
- 函数和编译
- 函数调用惯例
- 函数进栈和出栈
- 函数
- 编译
- sizeof
- main函数接收参数
- 宏函数
- 目标文件和可执行文件有什么
- 强符号和弱符号
- 什么是链接
- 符号
- 强引用和弱引用
- 字符串处理函数
- sscanf
- 查找子字符串
- 字符串指针
- qt
- MFC
- 指针
- 简介
- 指针详解
- 案例
- 指针数组
- 偏移量
- 间接赋值
- 易错点
- 二级指针
- 结构体指针
- 字节对齐
- 函数指针
- 指针例子
- main接收用户输入
- 内存布局
- 内存分区
- 空间开辟和释放
- 堆空间操作字符串
- 内存处理函数
- 内存分页
- 内存模型
- 栈
- 栈溢出攻击
- 内存泄露
- 大小端存储法
- 寄存器
- 结构体
- 共用体
- 枚举
- 文件操作
- 文件到底是什么
- 文件打开和关闭
- 文件的顺序读写
- 文件的随机读写
- 文件复制
- FILE和缓冲区
- 文件大小
- 插入,删除,更改文件内容
- typeid
- 内部链接和外部链接
- 动态库
- 调试器
- 调试的概念
- vs调试
- 多文件编程
- extern关键字
- 头文件规范
- 标准库以及标准头文件
- 头文件只包含一次
- static
- 多线程
- 简介
- 创建线程threads.h
- 创建线程pthread
- gdb
- 简介
- mac使用gdb
- setjump和longjump
- 零拷贝
- gc
- 调试器原理
- c++
- c++简介
- c++对c的扩展
- ::作用域运算符
- 名字控制
- cpp对c的增强
- const
- 变量定义数组
- 尽量以const替换#define
- 引用
- 内联函数
- 函数默认参数
- 函数占位参数
- 函数重载
- extern "C"
- 类和对象
- 类封装
- 构造和析构
- 深浅拷贝
- explicit关键字
- 动态对象创建
- 静态成员
- 对象模型
- this
- 友元
- 单例
- 继承
- 多态
- 运算符重载
- 赋值重载
- 指针运算符(*,->)重载
- 前置和后置++
- 左移<<运算符重载
- 函数调用符重载
- 总结
- bool重载
- 模板
- 简介
- 普通函数和模板函数调用
- 模板的局限性
- 类模板
- 复数的模板类
- 类模板作为参数
- 类模板继承
- 类模板类内和类外实现
- 类模板和友元函数
- 类模板实现数组
- 类型转换
- 异常
- 异常基本语法
- 异常的接口声明
- 异常的栈解旋
- 异常的多态
- 标准异常库
- 自定义异常
- io
- 流的概念和类库结构
- 标准io流
- 标准输入流
- 标准输出流
- 文件读写
- STL
- 简介
- string容器
- vector容器
- deque容器
- stack容器
- queue容器
- list容器
- set/multiset容器
- map/multimap容器
- pair对组
- 深浅拷贝问题
- 使用时机
- 常用算法
- 函数对象
- 谓词
- 内建函数对象
- 函数对象适配器
- 空间适配器
- 常用遍历算法
- 查找算法
- 排序算法
- 拷贝和替换算法
- 算术生成算法
- 集合算法
- gcc
- GDB
- makefile
- visualstudio
- VisualAssistX
- 各种插件
- utf8编码
- 制作安装项目
- 编译模式
- 内存对齐
- 快捷键
- 自动补全
- 查看c++类内存布局
- FFmpeg
- ffmpeg架构
- 命令的基本格式
- 分解与复用
- 处理原始数据
- 录屏和音
- 滤镜
- 水印
- 音视频的拼接与裁剪
- 视频图片转换
- 直播
- ffplay
- 常见问题
- 多媒体文件处理
- ffmpeg代码结构
- 日志系统
- 处理流数据
- linux
- 系统调用
- 常用IO函数
- 文件操作函数
- 文件描述符复制
- 目录相关操作
- 时间相关函数
- 进程
- valgrind
- 进程通信
- 信号
- 信号产生函数
- 信号集
- 信号捕捉
- SIGCHLD信号
- 不可重入函数和可重入函数
- 进程组
- 会话
- 守护进程
- 线程
- 线程属性
- 互斥锁
- 读写锁
- 条件变量
- 信号量
- 网络
- 分层模型
- 协议格式
- TCP协议
- socket
- socket概念
- 网络字节序
- ip地址转换函数
- sockaddr数据结构
- 网络套接字函数
- socket模型创建流程图
- socket函数
- bind函数
- listen函数
- accept函数
- connect函数
- C/S模型-TCP
- 出错处理封装函数
- 多进程并发服务器
- 多线程并发服务器
- 多路I/O复用服务器
- select
- poll
- epoll
- epoll事件
- epoll例子
- epoll反应堆思想
- udp
- socket IPC(本地套接字domain)
- 其他常用函数
- libevent
- libevent简介