
[TOC]
# 并行和并发
**并行(parallel):** 指在同一时刻,有多条指令在多个处理器上同时执行。
**并发(concurrency):** 指在同一时刻只能有一条指令执行,但多个进程指令被快速的轮换执行,使得在宏观上具有多个进程同时执行的效果,但在微观上并不是同时执行的,只是把时间分成若干段,使多个进程快速交替的执行。
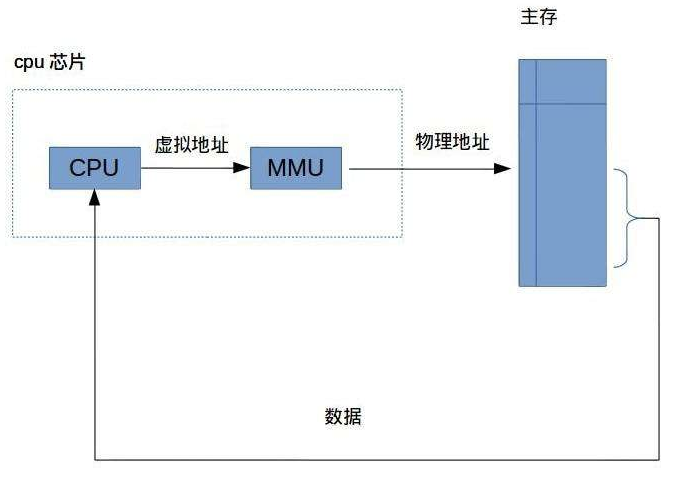
# MMU
MMU是Memory Management Unit的缩写,中文名是[内存管理](https://baike.baidu.com/item/%E5%86%85%E5%AD%98%E7%AE%A1%E7%90%86)单元,它是[中央处理器](https://baike.baidu.com/item/%E4%B8%AD%E5%A4%AE%E5%A4%84%E7%90%86%E5%99%A8)(CPU)中用来管理[虚拟存储器](https://baike.baidu.com/item/%E8%99%9A%E6%8B%9F%E5%AD%98%E5%82%A8%E5%99%A8)、物理存储器的控制线路,同时也负责[虚拟地址](https://baike.baidu.com/item/%E8%99%9A%E6%8B%9F%E5%9C%B0%E5%9D%80)映射为[物理地址](https://baike.baidu.com/item/%E7%89%A9%E7%90%86%E5%9C%B0%E5%9D%80),以及提供硬件机制的内存访问授权,多用户多进程操作系统。
# 进程控制块PCB
进程运行时,内核为进程每个进程分配一个PCB(进程控制块),维护进程相关的信息,Linux内核的进程控制块是task\_struct结构体。
在 /usr/src/linux-headers-xxx/include/linux/sched.h 文件中可以查看struct task\_struct 结构体定义:
> $ cat /usr/src/linux-headers-4.10.0-28/include/linux/sched.h
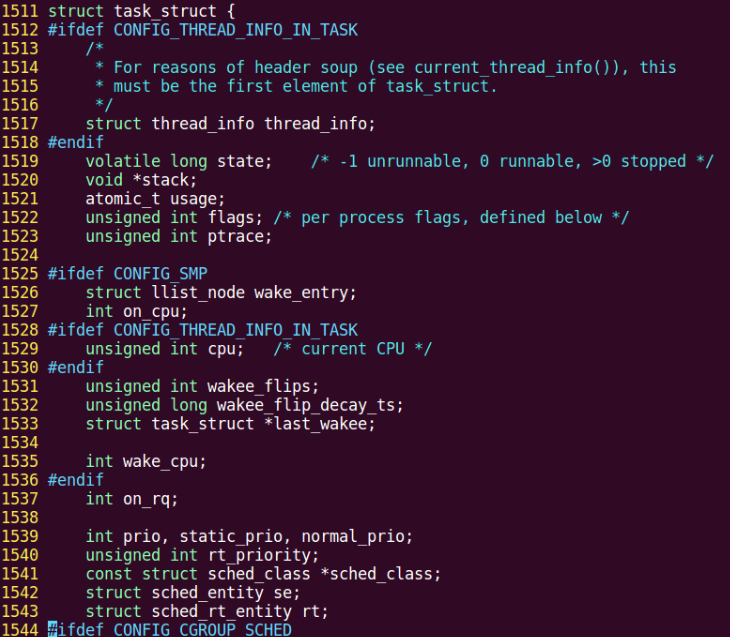
其内部成员有很多,我们掌握以下部分即可:
* 进程id。系统中每个进程有唯一的id,在C语言中用pid\_t类型表示,其实就是一个非负整数。
* 进程的状态,有就绪、运行、挂起、停止等状态。
* 进程切换时需要保存和恢复的一些CPU寄存器。
* 描述虚拟地址空间的信息。
* 描述控制终端的信息。
* 当前工作目录(Current Working Directory)。
* umask掩码。
* 文件描述符表,包含很多指向file结构体的指针。
* 和信号相关的信息。
* 用户id和组id。
* 会话(Session)和进程组。
* 进程可以使用的资源上限(Resource Limit)
# 进程状态
进程状态反映进程执行过程的变化。这些状态随着进程的执行和外界条件的变化而转换。
在三态模型中,进程状态分为三个基本状态,即**运行态,就绪态,阻塞态**。
在五态模型中,进程分为**新建态、终止态,运行态,就绪态,阻塞态**。
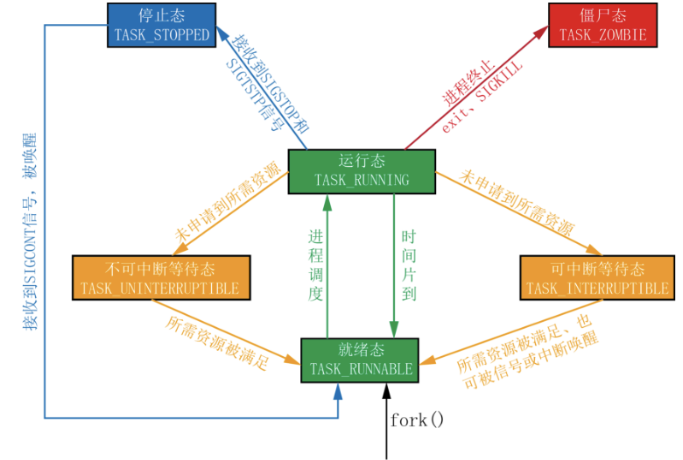
**①TASK\_RUNNING:** 进程正在被CPU执行。当一个进程刚被创建时会处于TASK\_RUNNABLE,表示己经准备就绪,正等待被调度。
**②TASK\_INTERRUPTIBLE(可中断):**进程正在睡眠(也就是说它被阻塞)等待某些条件的达成。一旦这些条件达成,内核就会把进程状态设置为运行。处于**此状态的进程也会因为接收到信号而提前被唤醒**,**比如给一个TASK\_INTERRUPTIBLE状态的进程发送SIGKILL信号,这个进程将先被唤醒(进入TASK\_RUNNABLE状态),然后再响应SIGKILL信号而退出**(变为TASK\_ZOMBIE状态),并不会从TASK\_INTERRUPTIBLE状态直接退出。
**③TASK\_UNINTERRUPTIBLE(不可中断):** 处于等待中的进程,待资源满足时被唤醒,**但不可以由其它进程通过信号或中断唤醒**。由于不接受外来的任何信号,**因此无法用kill杀掉这些处于该状态的进程**。而**TASK\_UNINTERRUPTIBLE状态存在的意义就在于**,**内核的某些处理流程是不能被打断的**。如果响应异步信号,程序的执行流程中就会被插入一段用于处理异步信号的流程,于是原有的流程就被中断了,这可能使某些设备陷入不可控的状态。处于TASK\_UNINTERRUPTIBLE状态一般总是非常短暂的,通过ps命令基本上不可能捕捉到。
**④TASK\_ZOMBIE(僵死):** 表示进程已经结束了,**但是其父进程还没有调用wait4或waitpid()来释放进程描述符**。为了父进程能够获知它的消息,子进程的进程描述符仍然被保留着。一旦父进程调用了wait4(),进程描述符就会被释放。
**⑤TASK\_STOPPED(停止):** 进程停止执行。当进程接收到SIGSTOP,SIGTSTP,SIGTTIN,SIGTTOU等信号的时候。此外,**在调试期间接收到任何信号**,都会使进程进入这种状态。**当接收到SIGCONT信号,会重新回到TASK\_RUNNABLE**。
如何查看进程状态:

stat中的参数意义如下:
| **参数** | **含义** |
| --- | --- |
| D | 不可中断 Uninterruptible(usually IO) |
| R | 正在运行,或在队列中的进程 |
| S(大写) | 处于休眠状态 |
| T | 停止或被追踪 |
| Z | 僵尸进程 |
| W | 进入内存交换(从内核2.6开始无效) |
| X | 死掉的进程 |
| < | 高优先级 |
| N | 低优先级 |
| s | 包含子进程 |
| + | 位于前台的进程组 |
# 进程号和相关函数
每个进程都由一个进程号来标识,其类型为 pid\_t(整型),进程号的范围:0~32767。进程号总是唯一的,但进程号可以重用。当一个进程终止后,其进程号就可以再次使用。
接下来,再给大家介绍三个不同的进程号。
**进程号(PID)**:
标识进程的一个非负整型数。
**父进程号(PPID)**:
任何进程( 除 init 进程)都是由另一个进程创建,该进程称为被创建进程的父进程,对应的进程号称为父进程号(PPID)。如,A 进程创建了 B 进程,A 的进程号就是 B 进程的父进程号。
**进程组号(PGID)**:
进程组是一个或多个进程的集合。他们之间相互关联,进程组可以接收同一终端的各种信号,关联的进程有一个进程组号(PGID) 。这个过程有点类似于 QQ 群,组相当于 QQ 群,各个进程相当于各个好友,把各个好友都拉入这个 QQ 群里,主要是方便管理,特别是通知某些事时,只要在群里吼一声,所有人都收到,简单粗暴。但是,这个进程组号和 QQ 群号是有点区别的,默认的情况下,当前的进程号会当做当前的进程组号。
**getpid函数**
~~~
#include <sys/types.h>
#include <unistd.h>
pid_t getpid(void);
功能:
获取本进程号(PID)
参数:
无
返回值:
本进程号
~~~
**getppid函数**
~~~
#include <sys/types.h>
#include <unistd.h>
pid_t getppid(void);
功能:
获取调用此函数的进程的父进程号(PPID)
参数:
无
返回值:
调用此函数的进程的父进程号(PPID)
~~~
**getpgid函数**
~~~
#include <sys/types.h>
#include <unistd.h>
pid_t getpgid(pid_t pid);
功能:
获取进程组号(PGID)
参数:
pid:进程号
返回值:
参数为 0 时返回当前进程组号,否则返回参数指定的进程的进程组号
~~~
示例程序:
~~~
int main()
{
pid_t pid, ppid, pgid;
pid = getpid();
printf("pid = %d\n", pid);
ppid = getppid();
printf("ppid = %d\n", ppid);
pgid = getpgid(pid);
printf("pgid = %d\n", pgid);
return 0;
}
~~~
# 进程创建
系统允许一个进程创建新进程,新进程即为子进程,子进程还可以创建新的子进程,形成进程树结构模型。
~~~
#include <sys/types.h>
#include <unistd.h>
pid_t fork(void);
功能:
用于从一个已存在的进程中创建一个新进程,新进程称为子进程,原进程称为父进程。
参数:
无
返回值:
成功:子进程中返回 0,父进程中返回子进程 ID。pid_t,为整型。
失败:返回-1。
失败的两个主要原因是:
1)当前的进程数已经达到了系统规定的上限,这时 errno 的值被设置为 EAGAIN。
2)系统内存不足,这时 errno 的值被设置为 ENOMEM。
~~~
示例代码
~~~
int main()
{
fork();
printf("id ==== %d\n", getpid()); // 获取进程号
return 0;
}
~~~
从运行结果,我们可以看出,fork() 之后的打印函数打印了两次,而且打印了两个进程号,这说明,fork() 之后确实创建了一个新的进程,新进程为子进程,原来的进程为父进程。
## 区分父子进程
子进程是父进程的一个复制品,可以简单认为父子进程的代码一样的。那大家想过没有,这样的话,父进程做了什么事情,子进程也做什么事情(如上面的例子),是不是不能实现满足我们实现多任务的要求呀,那我们是不是要想个办法区别父子进程呀,这就通过 fork() 的返回值。
fork() 函数被调用一次,但返回两次。两次返回的区别是:子进程的返回值是 0,而父进程的返回值则是新子进程的进程 ID
~~~
int main()
{
pid_t pid;
pid = fork();
if (pid < 0)
{ // 没有创建成功
perror("fork");
return 0;
}
if (0 == pid)
{ // 子进程
while (1)
{
printf("I am son\n");
sleep(1);
}
}
else if (pid > 0)
{ // 父进程
while (1)
{
printf("I am father\n");
sleep(1);
}
}
return 0;
}
~~~
通过运行结果,可以看到,父子进程各做一件事(各自打印一句话)。这里,我们只是看到只有一份代码,实际上,fork() 以后,有两个地址空间在独立运行着,有点类似于有两个独立的程序(父子进程)在运行着。
一般来说,在 fork() 之后是父进程先执行还是子进程先执行是不确定的。这取决于内核所使用的调度算法。
需要注意的是,在子进程的地址空间里,子进程是从 fork() 这个函数后才开始执行代码

## 父子进程地址空间
~~~
int a = 10; // 全局变量
int main()
{
int b = 20; //局部变量
pid_t pid;
pid = fork();
if (pid < 0)
{ // 没有创建成功
perror("fork");
}
if (0 == pid)
{ // 子进程
a = 111;
b = 222; // 子进程修改其值
printf("son: a = %d, b = %d\n", a, b);
}
else if (pid > 0)
{ // 父进程
sleep(1); // 保证子进程先运行
printf("father: a = %d, b = %d\n", a, b);
}
return 0;
}
~~~
通过得知,在子进程修改变量 a,b 的值,并不影响到父进程 a,b 的值。
# GDB调试多进程
~~~
gcc -9 源码
~~~
使用gdb调试的时候,gdb只能跟踪一个进程。可以在fork函数调用之前,通过指令设置gdb调试工具跟踪父进程或者是跟踪子进程。默认跟踪父进程。
* set follow-fork-mode child 设置gdb在fork之后跟踪子进程。
* set follow-fork-mode parent 设置跟踪父进程(默认)。
注意,一定要在gdb中的fork函数调用之前设置才有效。
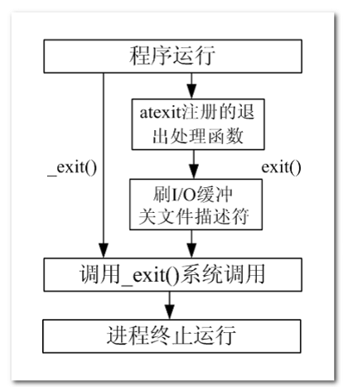
# 进程退出函数
~~~
#include <stdlib.h>
void exit(int status);
#include <unistd.h>
void _exit(int status);
功能:
结束调用此函数的进程。
参数:
status:返回给父进程的参数(低 8 位有效),至于这个参数是多少根据需要来填写。
返回值:
无
~~~
用法是一样的,无非时所包含的头文件不一样,还有的区别就是:exit()属于标准库函数,`_exit()`属于系统调用函数。
# 等待子进程退出函数
在每个进程退出的时候,内核释放该进程所有的资源、包括打开的文件、占用的内存等。但是仍然为其保留一定的信息,这些信息主要主要指进程控制块PCB的信息(包括进程号、退出状态、运行时间等)。
父进程可以通过调用wait或waitpid得到它的退出状态同时彻底清除掉这个进程。
wait() 和 waitpid() 函数的功能一样,区别在于,wait() 函数会阻塞,waitpid() 可以设置不阻塞,waitpid() 还可以指定等待哪个子进程结束。
注意:一次wait或waitpid调用只能清理一个子进程,清理多个子进程应使用循环。
## wait函数
~~~
#include <sys/types.h>
#include <sys/wait.h>
pid_t wait(int *status);
功能:
等待任意一个子进程结束,如果任意一个子进程结束了,此函数会回收该子进程的资源。
参数:
status : 进程退出时的状态信息。
返回值:
成功:已经结束子进程的进程号
失败: -1
~~~
调用 wait() 函数的进程会挂起(阻塞),直到它的一个子进程退出或收到一个不能被忽视的信号时才被唤醒(相当于继续往下执行)。
若调用进程没有子进程,该函数立即返回;若它的子进程已经结束,该函数同样会立即返回,并且会回收那个早已结束进程的资源。
所以,wait()函数的主要功能为回收已经结束子进程的资源。
如果参数 status 的值不是 NULL,wait() 就会把子进程退出时的状态取出并存入其中,这是一个整数值(int),指出了子进程是正常退出还是被非正常结束的。
这个退出信息在一个 int 中包含了多个字段,直接使用这个值是没有意义的,我们需要用宏定义取出其中的每个字段。
**宏函数可分为如下三组:**
1) WIFEXITED(status)
为非0 → 进程正常结束
WEXITSTATUS(status)
如上宏为真,使用此宏 → 获取进程退出状态 (exit的参数)
2) WIFSIGNALED(status)
为非0 → 进程异常终止
WTERMSIG(status)
如上宏为真,使用此宏 → 取得使进程终止的那个信号的编号。
3) WIFSTOPPED(status)
为非0 → 进程处于暂停状态
WSTOPSIG(status)
如上宏为真,使用此宏 → 取得使进程暂停的那个信号的编号。
WIFCONTINUED(status)
为真 → 进程暂停后已经继续运行
## waitpid函数
~~~
#include <sys/types.h>
#include <sys/wait.h>
pid_t waitpid(pid_t pid, int *status, int options);
功能:
等待子进程终止,如果子进程终止了,此函数会回收子进程的资源。
参数:
pid : 参数 pid 的值有以下几种类型:
pid > 0 等待进程 ID 等于 pid 的子进程。
pid = 0 等待同一个进程组中的任何子进程,如果子进程已经加入了别的进程组,waitpid 不会等待它。
pid = -1 等待任一子进程,此时 waitpid 和 wait 作用一样。
pid < -1 等待指定进程组中的任何子进程,这个进程组的 ID 等于 pid 的绝对值。
status : 进程退出时的状态信息。和 wait() 用法一样。
options : options 提供了一些额外的选项来控制 waitpid()。
0:同 wait(),阻塞父进程,等待子进程退出。
WNOHANG:没有任何已经结束的子进程,则立即返回。
WUNTRACED:如果子进程暂停了则此函数马上返回,并且不予以理会子进程的结束状态。(由于涉及到一些跟踪调试方面的知识,加之极少用到)
返回值:
waitpid() 的返回值比 wait() 稍微复杂一些,一共有 3 种情况:
1) 当正常返回的时候,waitpid() 返回收集到的已经回收子进程的进程号;
2) 如果设置了选项 WNOHANG,而调用中 waitpid() 发现没有已退出的子进程可等待,则返回 0;
3) 如果调用中出错,则返回-1,这时 errno 会被设置成相应的值以指示错误所在,如:当 pid 所对应的子进程不存在,或此进程存在,但不是调用进程的子进程,waitpid() 就会出错返回,这时 errno 被设置为 ECHILD;
~~~
# 孤儿和僵尸进程
**孤儿进程**
父进程运行结束,但子进程还在运行(未运行结束)的子进程就称为孤儿进程(Orphan Process)。
每当出现一个孤儿进程的时候,内核就把孤儿进程的父进程设置为 init ,而 init 进程会循环地 wait() 它的已经退出的子进程。这样,当一个孤儿进程凄凉地结束了其生命周期的时候,init 进程就会代表党和政府出面处理它的一切善后工作。
因此孤儿进程并不会有什么危害。
**僵尸进程**
进程终止,父进程尚未回收,子进程残留资源(PCB)存放于内核中,变成僵尸(Zombie)进程。
这样就会导致一个问题,如果进程不调用wait() 或 waitpid() 的话, 那么保留的那段信息就不会释放,其进程号就会一直被占用,但是系统所能使用的进程号是有限的,如果大量的产生僵尸进程,将因为没有可用的进程号而导致系统不能产生新的进程,此即为僵尸进程的危害,应当避免。
# 进程替换
可以通过 ./ 运行,让一个可执行程序成为一个进程。
但是,如果我们本来就运行着一个程序(进程),我们如何在这个进程内部启动一个外部程序,由内核将这个外部程序读入内存,使其执行起来成为一个进程呢?这里我们通过 exec 函数族实现。
exec 函数族,顾名思义,就是一簇函数,在 Linux 中,并不存在 exec() 函数,exec 指的是一组函数,一共有 6 个:
~~~
#include <unistd.h>
extern char **environ;
int execl(const char *path, const char *arg, .../* (char *) NULL */);
int execlp(const char *file, const char *arg, ... /* (char *) NULL */);
int execle(const char *path, const char *arg, .../*, (char *) NULL, char * const envp[] */);
int execv(const char *path, char *const argv[]);
int execvp(const char *file, char *const argv[]);
int execvpe(const char *file, char *const argv[], char *const envp[]);
int execve(const char *filename, char *const argv[], char *const envp[]);
~~~
其中只有 execve() 是真正意义上的系统调用,其它都是在此基础上经过包装的库函数。
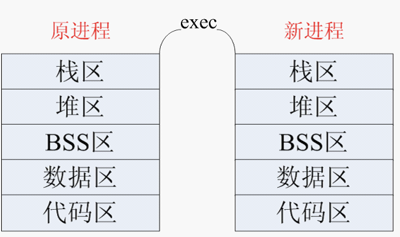
exec 函数族的作用是根据指定的文件名或目录名找到可执行文件,并用它来取代调用进程的内容,换句话说,就是在调用进程内部执行一个可执行文件。
进程调用一种 exec 函数时,该进程完全由新程序替换,而新程序则从其 main 函数开始执行。因为调用 exec 并不创建新进程,所以前后的进程 ID (当然还有父进程号、进程组号、当前工作目录……)并未改变。exec 只是用另一个新程序替换了当前进程的正文、数据、堆和栈段(进程替换)。
**exec 函数族使用说明**
exec 函数族的 6 个函数看起来似乎很复杂,但实际上无论是作用还是用法都非常相似,只有很微小的差别。
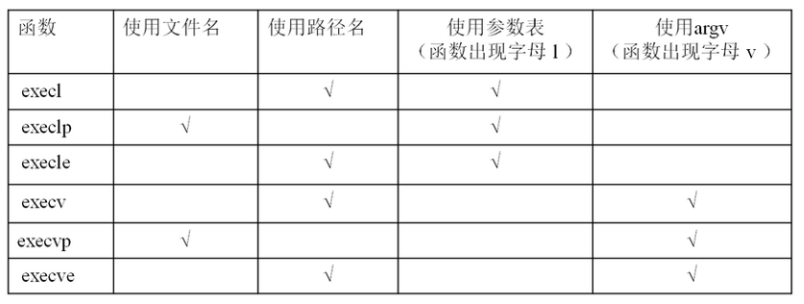
补充说明:
| l(list) | 参数地址列表,以空指针结尾 |
| --- | --- |
| v(vector) | 存有各参数地址的指针数组的地址 |
| p(path) | 按 PATH 环境变量指定的目录搜索可执行文件 |
| e(environment) | 存有环境变量字符串地址的指针数组的地址 |
exec 函数族与一般的函数不同,exec 函数族中的函数执行成功后不会返回,
**而且,exec 函数族下面的代码执行不到**。
只有调用失败了,它们才会返回 -1,失败后从原程序的调用点接着往下执行
- c语言
- 基础知识
- 变量和常量
- 宏定义和预处理
- 随机数
- register变量
- errno全局变量
- 静态变量
- 类型
- 数组
- 类型转换
- vs中c4996错误
- 数据类型和长度
- 二进制数,八进制数和十六进制数
- 位域
- typedef定义类型
- 函数和编译
- 函数调用惯例
- 函数进栈和出栈
- 函数
- 编译
- sizeof
- main函数接收参数
- 宏函数
- 目标文件和可执行文件有什么
- 强符号和弱符号
- 什么是链接
- 符号
- 强引用和弱引用
- 字符串处理函数
- sscanf
- 查找子字符串
- 字符串指针
- qt
- MFC
- 指针
- 简介
- 指针详解
- 案例
- 指针数组
- 偏移量
- 间接赋值
- 易错点
- 二级指针
- 结构体指针
- 字节对齐
- 函数指针
- 指针例子
- main接收用户输入
- 内存布局
- 内存分区
- 空间开辟和释放
- 堆空间操作字符串
- 内存处理函数
- 内存分页
- 内存模型
- 栈
- 栈溢出攻击
- 内存泄露
- 大小端存储法
- 寄存器
- 结构体
- 共用体
- 枚举
- 文件操作
- 文件到底是什么
- 文件打开和关闭
- 文件的顺序读写
- 文件的随机读写
- 文件复制
- FILE和缓冲区
- 文件大小
- 插入,删除,更改文件内容
- typeid
- 内部链接和外部链接
- 动态库
- 调试器
- 调试的概念
- vs调试
- 多文件编程
- extern关键字
- 头文件规范
- 标准库以及标准头文件
- 头文件只包含一次
- static
- 多线程
- 简介
- 创建线程threads.h
- 创建线程pthread
- gdb
- 简介
- mac使用gdb
- setjump和longjump
- 零拷贝
- gc
- 调试器原理
- c++
- c++简介
- c++对c的扩展
- ::作用域运算符
- 名字控制
- cpp对c的增强
- const
- 变量定义数组
- 尽量以const替换#define
- 引用
- 内联函数
- 函数默认参数
- 函数占位参数
- 函数重载
- extern "C"
- 类和对象
- 类封装
- 构造和析构
- 深浅拷贝
- explicit关键字
- 动态对象创建
- 静态成员
- 对象模型
- this
- 友元
- 单例
- 继承
- 多态
- 运算符重载
- 赋值重载
- 指针运算符(*,->)重载
- 前置和后置++
- 左移<<运算符重载
- 函数调用符重载
- 总结
- bool重载
- 模板
- 简介
- 普通函数和模板函数调用
- 模板的局限性
- 类模板
- 复数的模板类
- 类模板作为参数
- 类模板继承
- 类模板类内和类外实现
- 类模板和友元函数
- 类模板实现数组
- 类型转换
- 异常
- 异常基本语法
- 异常的接口声明
- 异常的栈解旋
- 异常的多态
- 标准异常库
- 自定义异常
- io
- 流的概念和类库结构
- 标准io流
- 标准输入流
- 标准输出流
- 文件读写
- STL
- 简介
- string容器
- vector容器
- deque容器
- stack容器
- queue容器
- list容器
- set/multiset容器
- map/multimap容器
- pair对组
- 深浅拷贝问题
- 使用时机
- 常用算法
- 函数对象
- 谓词
- 内建函数对象
- 函数对象适配器
- 空间适配器
- 常用遍历算法
- 查找算法
- 排序算法
- 拷贝和替换算法
- 算术生成算法
- 集合算法
- gcc
- GDB
- makefile
- visualstudio
- VisualAssistX
- 各种插件
- utf8编码
- 制作安装项目
- 编译模式
- 内存对齐
- 快捷键
- 自动补全
- 查看c++类内存布局
- FFmpeg
- ffmpeg架构
- 命令的基本格式
- 分解与复用
- 处理原始数据
- 录屏和音
- 滤镜
- 水印
- 音视频的拼接与裁剪
- 视频图片转换
- 直播
- ffplay
- 常见问题
- 多媒体文件处理
- ffmpeg代码结构
- 日志系统
- 处理流数据
- linux
- 系统调用
- 常用IO函数
- 文件操作函数
- 文件描述符复制
- 目录相关操作
- 时间相关函数
- 进程
- valgrind
- 进程通信
- 信号
- 信号产生函数
- 信号集
- 信号捕捉
- SIGCHLD信号
- 不可重入函数和可重入函数
- 进程组
- 会话
- 守护进程
- 线程
- 线程属性
- 互斥锁
- 读写锁
- 条件变量
- 信号量
- 网络
- 分层模型
- 协议格式
- TCP协议
- socket
- socket概念
- 网络字节序
- ip地址转换函数
- sockaddr数据结构
- 网络套接字函数
- socket模型创建流程图
- socket函数
- bind函数
- listen函数
- accept函数
- connect函数
- C/S模型-TCP
- 出错处理封装函数
- 多进程并发服务器
- 多线程并发服务器
- 多路I/O复用服务器
- select
- poll
- epoll
- epoll事件
- epoll例子
- epoll反应堆思想
- udp
- socket IPC(本地套接字domain)
- 其他常用函数
- libevent
- libevent简介