## :-: **KUKA**
:-: 
### :-: [点击下载插件](https://pan.baidu.com/s/1CYeumT5BONf-syuHey4kHw?pwd=xp0g)
**作者:**
by Robots in Architecture
**官网:**
https://www.robotsinarchitecture.org/
**简介:**
KUKA|prc对感兴趣数字建造的伙伴们应该都不陌生。它提供了直接将KUKA机器人集成到参数化环境中的机器人构建块。与编写代码不同,Grasshopper中简单的电池组相互连接,其控制机械的运动结果会立即反馈与可视化成一组的动态模拟过程,快速地将编程环境与机器人,以及设计与建造联系在一起。生成的文件可以在KUKA机械臂中执行,而无需任何其他软件。免费的试用版就可以满足机械臂路径的基本仿真方法和代码生成。其他功能,例如对SunriseOS的支持,外轴,GCode导入等,仅适用于付费会员。
* **让机器人进入创意产业**
我们创建了KUKA|prc,目标是让工业机器人进入创意产业。
因此,建筑机器人协会的会员可以免费使用KUKA|prc进行研究和教学——每年的会员费为450€。成员资格扩展到所有员工和学生,因此KUKA|prc也可以安装在所有私人机器上,而不仅仅是在实验室中。
KUKA|prc也越来越多地用于高端木材加工公司、航空业的市场领导者,甚至用于核反应堆。对于这些应用,需要商业许可证。
* **无障碍编程**
KUKA|prc基于可访问的可视化编程系统Grasshopper,该系统是CAD软件Rhinoceros 3D的一部分。
它提供了将KUKA机器人直接集成到参数化环境中的机器人构建模块。简单的功能块相互连接,结果立即可视化,而不是编写代码。
这种反馈允许你快速地从编程环境转移到机器人,或者从设计转移到制造。
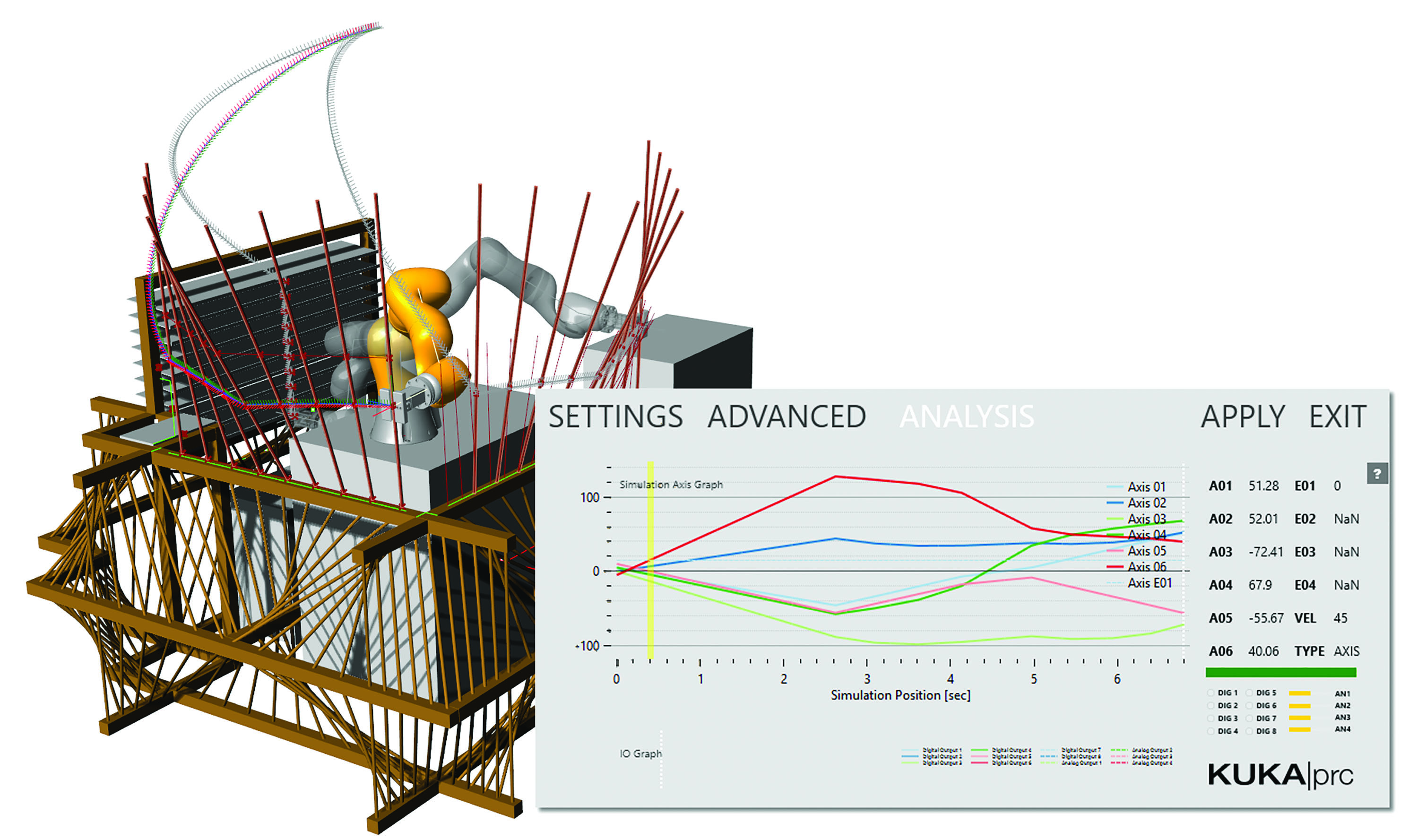
* **精确模拟**
我们已经将我们所有的机器人经验整合到开发一个快速可靠的机器人模拟器中。
它帮助你快速验证你的机器人程序,并确保没有碰撞或不可及的点。一个图表映射了所有的轴运动,允许你发现和避免奇点。
有了即时反馈,您可以通过与参数化定义交互并观察结果来直观地解决问题。
* **快速优化**
KUKA|prc在短时间内模拟所有机器人位置,让您访问所有工具位置、所有轴值、碰撞值、IO状态等。
KUKA|prc完全集成到Grasshopper生态系统中,允许您在机器人项目中构建各种算法和实用程序:使用Kangaroo找到一个形状,然后通过Grasshopper内置的进化求解器Galapagos优化刀具路径。或者利用Hoopsnake迭代求解问题。
* **为库卡制造**
我们专门为KUKA机器人优化了KUKA|prc,带来了从小型AGILUS机器人到1吨重的Titan机器人的大型机器人库。
KUKA|prc甚至模拟了新的KUKA iiwa,一种用于直接人机交互的七轴机器人。
* **可扩展的硬件和软件**
KUKA|prc甚至可以模拟多达四个外部轴的复杂机器人设置。它还可以自己求解外部轴位置,只需输入机器人和目标之间的首选距离(对于轨道系统)或3D矢量(对于旋转轴), KUKA|prc就会自动设置这些值。
定义您自己的工具,或者使用KUKA|prc提供的工具。
* **直接开发人员支持**
KUKA|prc是建立在我们自己的代码和研究之上的。因此,我们可以根据您的要求进行调整,帮助您实现高度非标准的项目。
**示意图:**

- 简介
- 序言
- 使用说明
- 版权证书
- 词典版本介绍
- 一.GH原生电池(完整884个)
- Params类
- Geometry组
- Point★
- Vector
- Circle
- Circular Arc
- Curve★
- Line
- Plane
- Retangle
- Box
- Brep★
- Mesh★
- Mesh Face
- SubD
- Surface★
- Twisted Box
- Field
- Geometry★
- Geometry Cache
- Geometry Pipeline
- Group
- Transform
- Primitive组
- Boolean
- Integer★
- Number★
- Text★
- Colour
- Complex
- Culture
- Domain
- Domain²
- Guid
- Metrix
- Time
- Data★
- Data Path
- File Path★
- Shader
- Input组
- Number Slider★
- Panel★
- Boolean Toggle★
- Button★
- Control Knob
- Digit Scroller
- MD Slider
- Value List
- Calendar
- Clock
- Colour Picker
- Color Swatch★
- Colour Wheel
- Gradient★
- Graph Mapper★
- Image Sample★
- Atom Data
- Image Resource
- Import 3DM
- Import Coordinates
- Import Image
- Import PDB
- Import SHP★
- Object Details
- Read File
- Util组
- Cherry Picker
- Jump
- Param Viewer★
- Scribble★
- Data Dam
- Data Recorder★
- Relay
- Suirify
- Trigger
- Cluster Input★
- Cluster Output★
- Data Input
- Data Output
- Context Bake
- Context Print
- Get Geometry
- Get Integer
- Get Line
- Get Number
- Get Point
- Get String
- Fitness Landscape
- Galapagos★
- Gene Pool★
- Maths类
- Domain组
- Construct Domain★
- Deconstruct Domain★
- Bounds★
- Consecutive Domains★
- Divide Domain
- Find Domain★
- Includes★
- Remap Numbers★
- Construct Domain²
- Construct Domain²
- Deconstruct Domain²
- Deconstruct Domain²
- Bounds 2D
- Divide Domain²★
- Matrix组
- Construct Matrix
- Deconstruct Matrix
- Display Matrix
- Invert Matrix
- Transpose Matrix
- Swap Columns
- Swap Rows
- Operators组
- Addition★
- Division★
- Multiplication★
- Negative★
- Power★
- Subtraction★
- Absolute★
- Factorial
- Mass Addition★
- Larger Than★
- Smaller Than★
- Equality★
- Integer Division★
- Modulus★
- Mass Multiplication★
- Relative Differences
- Similarity★
- Gate And
- Gate Not
- Gate Or
- Gate Xor
- Gate Majority
- Gate Nand
- Gate Nor
- Gate Xnor
- Polynomials组
- Cube★
- Cube Root
- Square★
- Square Root
- One Over X★
- Power of 10
- Power of 2
- Power of E
- Log N
- Logarithm
- Natural Logarithm
- Script组
- Evaluate★
- Expression★
- C# Script
- GHPython Script
- VB Script
- Time组
- Construct Date
- Construct Exotic Date
- Construct Smooth Time
- Construct Time
- Deconstruct Date
- Combine Date & Time
- Date Range
- Interpolate Date
- Trig组
- Cosine★
- Sinc
- Sine★
- Tangent★
- ArcCosine
- ArcSine
- ArcTangent
- CoSecant
- CoTangent
- Secant
- Degrees★
- Radians★
- Right Trigonometry
- Triangle Trigonometry
- Centroid
- Circumcentre
- Incentre
- Orthocentre
- Util组
- Epsilon
- Golden Ratio★
- Natural logarithm
- Pi★
- Extremes
- Maximum★
- Minimum★
- Round★
- Average★
- Blur Numbers
- Interpolate data
- Smooth Numbers★
- Truncate
- Weighted Average
- Complex Argument
- Complex Components
- Complex Conjujate
- Complex Modulus
- Create Complex
- Sets类
- List组
- Insert Items★
- Item Index
- List Item★
- List Length★
- Partition List★
- Replace Items
- Reverse List
- Shift List★
- Sort List★
- Split List★
- Sub List★
- Dispatch★
- Null Item★
- Pick'n'Choose★
- Replace Nulls
- Weave★
- Combine Data
- Sift Pattern
- Cross Reference
- Longest List
- Shortest List
- Sequence组
- Cull Index★
- Cull Nth
- Cull Pattern★
- Random Reduce★
- Char Sequence
- Duplicate Data★
- Fibonacci★
- Range★
- Repeat Data★
- Sequence
- Series★
- Stack Data
- Jitter★
- Random★
- Sets组
- Create Set★
- Delete Consecutive★
- Find similar number★
- Member Index★
- Set Difference
- Set Difference(S)
- Set Intersection
- Set Majority
- Set Union
- Carthesian Product
- Replace Members★
- SubSet
- Disjoint
- Key/Value Search
- Text组
- Characters
- Concatenate★
- Text Join
- Text Length
- Text Split★
- Format
- Text Case
- Text Fragment
- Text Trim
- Match Text
- Replace Text★
- Sort Text★
- Text Distance
- Text On Surface
- Tree组
- Clean Tree★
- Flatten Tree★
- Graft Tree★
- Prune Tree
- Simplify Tree
- Tree Statistics★
- Trim Tree
- Unflatten Tree
- Entwine★
- Explode Tree★
- Flip Metrix★
- Merge★
- Match Tree
- Path Mapper★
- Shift Paths★
- Split Tree
- Stream Filter★
- Stream Gate★
- Relative Item
- Relative Items
- Tree Branch★
- Tree Item
- Construct Path
- Deconstruct Path
- Path Compare
- Replace Paths★
- Vector类
- Field组
- Line Charge
- Point Charge
- Spin Force
- Vector Force
- Break Field
- Merge Fields
- Evaluate Field
- Field Line
- Direction Display
- Perpendicular Display
- Scalar Display
- Tensor Display
- Grid组
- Hexagonal
- Radial
- Rectangular★
- Square★
- Triangular
- Populate 2D★
- Populate 3D★
- Populate Geometry★
- Plane组
- Deconstruct Plane★
- XY Plane★
- XZ Plane★
- YZ Plane★
- Construct Plane★
- Line + Line★
- Line + Pt★
- Plane 3Pt
- Plane Fit
- Plane Normal★
- Plane Offset
- Plane Origin★
- Adjust Plane
- Align Plane★
- Align Planes★
- Flip Plane
- Plane Closest Point
- Plane Coordinates
- Rotate Plane
- Point组
- Construct Point★
- Deconstruct★
- Numbers to Points
- Points to Numbers
- Barycentric
- Distance★
- Point Cylindrical
- Point Oriented
- Point Polar
- To Polar
- Closest Point★
- Closest Points★
- Cull Duplicates★
- Point Groups
- Project Point★
- Pull Point★
- Sort Along Curve
- Sort Points
- Vector组
- Deconstruct Vector★
- Vector XYZ★
- Unit X★
- Unit Y★
- Unit Z★
- Amplitude★
- Angle★
- Vector 2Pt★
- Unit Vector
- Cross Product
- Dot Product
- Reverse
- Rotate
- Vector Length★
- Curve类
- Analysis组
- Control Points
- Control Polygon
- Curve Middle
- Deconstruct Arc★
- Deconstruct Rectangle
- End Points★
- Polygon Center★
- Closed
- Curvature Graph
- Curve Closest Point★
- Curve Nearest Object
- Curve Proximity
- Curve Side
- Discontinuity★
- Extremes
- Planar
- Curvature
- Curve Frame★
- Derivatives
- Evaluate Curve★
- Horizontal Frame★
- Perp Frame★
- Point On Curve★
- Torsion
- Curve Domain
- Evaluate Length
- Length★
- Length Domain
- Length Parameter
- Segment Lengths
- Point In Curve★
- Point in Curves★
- Division组
- Contour★
- Contour(ex)★
- Dash Pattern★
- Divide Curve★
- Divide Distance★
- Divide Length★
- Shatter★
- Curve Frames★
- Horizontal Frames★
- Perp Frames★
- Primitive组
- Fit Line
- Line★
- Line 2Plane
- Line 4Pt
- Line SDL★
- Tangent Lines
- Tangent Lines(Ex)
- Tangent Lines(In)
- Circle★
- Circle 3Pt
- Circle CNR
- Circle Fit
- Circle TanTan
- Circle TanTanTan
- Ellipse★
- InCircle
- InEllipse
- Arc
- Arc 3Pt
- Arc SED
- BiArc
- Modified Arc
- Tangent Arcs
- Polygon★
- Polygon Edge
- Rectangle★
- Retangle 2Pt
- Retangle 3Pt
- Spline组
- Bezier Span
- Interpolate★
- Interpolate(t)
- Kinky Curve
- Nurbs Curve★
- PolyArc
- PolyLine★
- Tangent Curve
- Curve On Surface
- Geodesic
- Iso Curve★
- Sub Curve★
- Tween Curve★
- Knot Vector
- Nurbs Curve PWK
- Blend Curve
- Blend Curve Pt
- Catenary
- Connect Curves
- Util组
- Explode★
- Extend Curve★
- Flip Curve★
- Join Curves★
- Fillet
- Fillet★
- Fillet Distance
- Offset Curve★
- Offset Curve Loose
- Offset on Srf
- Project★
- Pull Curve
- Seam
- Curve To Polyline
- Fit Curve
- Polyline Collapse
- Rebuild Curve
- Reduce
- Simplify Curve
- Smooth Polyline★
- Surface类
- Analysis组
- Box Corners
- Box Properties
- Deconstruct Box
- Evaluate Box
- Brep Edges★
- Brep Topology
- Brep Wireframe
- Deconstruct Brep★
- Dimensions★
- Is Planar
- Surface Points
- Area★
- Area Moments
- Volume★
- Volume Moments
- Brep Closest Point★
- Surface Closest Point★
- Point In Brep★
- Point In Breps★
- Point In Trim
- Shape In Brep
- Evaluate Surface★
- Osculating Circles
- Principal Curvature
- Surface Curvature
- Freeform组
- 4Pt Surface
- Surface From Points★
- Boundary Surfaces★
- Control Point Loft
- Edge Surface★
- Fit Loft
- Loft★
- Loft Options★
- Network Surface
- Ruled Surface
- Sum Surface
- Extrude★
- Extrude Along
- Extrude Linear
- Fragment Patch
- Patch★
- Pipe★
- Pipe Variable
- Sweep1★
- Sweep2★
- Rail Revolution
- Revolution
- Extrude Point
- Primitive组
- Plane Surface★
- Plane Through Shape
- Bounding Box★
- Box 2Pt
- Box Rectangle
- Center Box★
- Domain Box
- Cone
- Cylinder★
- Quad Sphere
- Sphere★
- Sphere 4Pt
- Sphere Fit
- SubD组
- Mesh from SubD
- SubD from Mesh
- MultiPipe
- SubD Control Polygon
- SubD Edges
- SubD Fuse
- SubD Vertices
- SubD Edge Tags
- SubD Vertex Tags
- Util组
- Divide Surface★
- Surface Frames★
- Copy Trim★
- Isotrim★
- Retrim
- Untrim
- Brep Join★
- Cap Holes★
- Cap Holes Ex
- Merge Faces★
- Flip
- Offset Surface★
- Offset Surface Loose
- Convex Edges
- Edges from Directions
- Edges from Faces
- Edges from Length
- Edges from Linearity
- Edges from Points
- Fillet Edge
- Mesh类
- Analysis组
- Deconstruct Face★
- Deconstruct Mesh★
- Face Normals★
- Mesh ConvertQuads
- Mesh Edges★
- Mesh Explode★
- Mesh Triangulate
- Face Boundaries★
- Face Circles
- Mesh Inclusion★
- Mesh Area★
- Mesh Closest Point★
- Mesh Eval★
- Mesh NakedEdge
- Mesh Volume★
- Mesh AddAttributes
- Mesh ExtractAttributes
- Primitive组
- Construct Mesh★
- Mesh Colours★
- Mesh Quad★
- Mesh Spray★
- Mesh Triangle★
- Mesh Box★
- Mesh Pipe★
- Mesh Plane★
- Mesh Sphere★
- Mesh Sphere Ex
- Mesh Sweep★
- Triangulation组
- Convex Hull
- Delaunay Edges
- Delaunay Mesh★
- Substrate★
- Facet Dome
- Voronoi★
- Voronoi 3D
- Voronoi Cell★
- Voronoi Groups
- OcTree
- Proximity 2D
- Proximity 3D
- QuadTree
- MetaBall★
- MetaBall(t)
- MetaBall(t) Custom
- 3D ConvexHull
- 3D Delaunay
- 3D DelaunayCell
- 3D Voronoi
- Convex Hull Points
- Quad Remesh★
- Quad Remesh Settings★
- TriRemesh★
- Util组
- Mesh Brep★
- Mesh FromPoints★
- Mesh Surface
- Settings(Custom)★
- Settings(Quality)★
- Settings(Speed)★
- Simple Mesh★
- Blur Mesh
- Cull Faces
- Cull Vertices
- Delete Faces
- Delete Vertices
- Disjoint Mesh★
- Mesh Join★
- Mesh Shadow★
- Mesh Split Plane
- Smooth Mesh★
- Align Vertices
- Flip Mesh
- Mesh CullUnused Vertices
- Mesh Flip
- Mesh UnifyNormals
- Mesh WeldVertices★
- Quadrangulate
- Triangulate
- Unify Mesh
- Unweld Mesh
- Weld Mesh
- Exposure
- Occlusion
- Intersect类
- Mathematical组
- Brep / Line★
- Curve / Line★
- Line / Line
- Mesh / Ray★
- Surface / Line★
- Brep / Plane
- Contour★
- Contour(ex)
- Curve / Plane
- Line / Plane
- Mesh / Plane
- Plane / Plane
- Plane / Plane / Plane
- Plane Region
- IsoVist★
- IsoVist Ray★
- Physical组
- Curve / Curve★
- Mesh / Curve★
- Brep / Brep★
- Surface Split★
- Curve / Self★
- Multiple Curves★
- Brep / Curve★
- Surface / Curve★
- Mesh / Mesh★
- Clash
- Collision Many/Many
- Collision One/Many
- Region组
- Split with Brep
- Split with Breps
- Trim with Brep
- Trim with Breps
- Trim with Region
- Trim with Regions
- Shape组
- Boundary Volume
- Solid Difference
- Solid Intersection
- Solid Union★
- Split Brep
- Split Brep Multiple
- Trim Solid
- Region Difference
- Region Intersection
- Region Union★
- Mesh Difference
- Mesh Intersection
- Mesh Split
- Mesh Union★
- Box Slits
- Region Slits
- Transform类
- Affine组
- Camera Obscura
- Scale★
- Scale NU★
- Shear
- Shear Angle
- Box Mapping
- Orient Direction
- Project★
- Project Along★
- Rectangle Mapping
- Triangle Mapping
- Array组
- Box Array★
- Curve Array★
- Linear Array
- Polar Array
- Rectangular Array★
- Kaleidoscope
- Euclidean组
- Mirror★
- Move★
- Move Away From
- Move To Plane
- Orient★
- Rotate★
- Rotate 3D★
- Rotate Axis★
- Rotate Direction
- Morph组
- Blend Box
- Box Morph★
- Surface Box★
- Twisted Box
- Bend Deform
- Flow★
- Maelstrom
- Mirror Curve
- Mirror Surface
- Splop
- Sporph★
- Stretch
- Surface Morph
- Taper
- Twist
- Map to Surface
- Point Deform
- Spatial Deform
- Spatial Deform(custom)
- Util组
- Compound
- Split
- Inverse Transform
- Transform
- Transform Metrix
- Group★
- Ungroup★
- Merge Group
- Split Group
- Display类
- Colour组
- Colour CMYK
- Colour HSL
- Colour HSV
- Colour L*ab
- Colour LCH
- Colour RGB
- Colour RGB(f)
- Colour XYZ
- Split AHSL
- Split AHSV
- Split ARGB
- Dimensions组
- Gradient Hatch★
- Pattern Hatch★
- Text Tag
- Text Tag 3D★
- Aligned Dimension
- Line Dimension★
- Linear Dimension
- Marker Dimension
- Serial Dimension
- Angular Dimension★
- Angular Dimensions(Mesh)
- Arc Dimension
- Circular Dimension
- Make2D
- Make2D Parallel View
- Make2D Perspective View
- Make2D Rhino View
- Graphs组
- Bar Graph
- Legend★
- Pie Chart
- Quick Graph
- Image Gallery
- Value Tracker
- Preview组
- Create Material★
- Custom Preview★
- Cloud Display
- Dot Display★
- Symbol(Advanced)
- Symbol(Simple)
- Symbol Display
- Vector组
- Point List★
- Point Order
- Vector Display★
- Vector Display Ex★
- 内置插件:Kangaroo2
- Goals-6dof组
- AlignFaces
- Beam
- Concentric
- RigidBody
- RigidBodyCollide
- RigidPointSet
- SolidPlaneCollide
- Support
- Goals-Angle组
- Angle
- AngleSnap
- ClampAngle
- EqualAngle
- G2
- Rod
- Goals-Co组
- CoCircular
- CoLinear
- CoPlanar
- CoSpherical
- Goals-Col组
- Collider
- CurveCollide
- CurvePointCollide
- ImageCircles
- SoftBodyCollide
- SolidPointCollide
- SphereCollide
- Goals-Lin组
- ClampLength
- ConstantTension
- Direction
- DynamicWeight1d
- EqualLength
- Length(Line)
- LengthRatio
- LengthSnap
- PlasticLength
- Goals-Mesh组
- Conicalize
- CyclicQuad
- Developablize
- EdgeLengths
- Hinge
- Isothermic
- LiveSoap
- NoFoldThrough
- Planarize
- PlasticHinge
- PolygonArea
- Pressure
- Smooth
- SoapFilm
- TangentialSmooth
- TangentIncircles
- VertexLoads
- Volume
- Wind
- Goals-On组
- OnCurve
- OnMesh
- OnPlane
- Goals-Pt组
- Anchor
- AnchorXYZ
- Bomb
- Coincident
- Floor
- FloorFriction
- Load
- MagnetSnap
- PlasticAnchor
- Transform
- Main组
- BouncySolver
- Grab
- Show
- Soft&Hard Solver
- Solver
- StepSolver
- ZombieSolver
- Mesh组
- Bipartite
- ByParent
- Checkerboard
- Combine&Clean
- Diagonalize
- FaceFaceOffset
- FoldAngle
- HingePoints
- MeshCorners
- MeshDirection
- MeshMap
- MeshTurn
- NakedVertices
- PlanarityAnalysis
- Refine
- RefineStrips
- RemeshByColour
- Stripper
- TangentCircles
- Unroller
- VertexNeighbours
- WarpWeft
- Utility组
- DotDisplay
- interconnectPoints
- Möbius transformation
- removeDuplicateLines
- removeDuplicatePts
- SplitAtCorners
- 二.GH插件分类介绍(精选291个)
- 1.数据处理类
- 地理空间数据
- OSM数据源
- Caribou
- ELK
- Gismo
- Meerkat GIS
- Urbano
- GIS数据源
- @it
- GHopperGIS
- GHSHP
- Heron
- Ibex
- 虚拟网络数据
- 社交数据
- Mosquito
- 金融数据
- Squirrel
- 程序过程数据
- 迭代计算
- Anemone
- HoopSnake
- 单位换算
- Caterpillar
- 复杂数据结构
- EdiTree
- Treesloth
- 几何属性编辑
- EleFront
- Fabtools
- Human
- 多线程环境设置
- Impala
- Jason提取
- jSwan
- 数据平台协同
- Excel协同
- Bumblebee
- Google Firebase协同
- Firehopper
- sMath Studio协同
- ghMath
- 2.分析模拟类
- 城市空间分析
- 城市功能布局
- Chameleon.tools
- DecodingSpaces
- 城市空间句法
- Numeric Network Analysis
- SmartSpaceAnalyser
- SpaceChase
- Syntactic
- 路径交通模拟
- Dog
- Geodesic lines on mesh
- LeafVein
- Mouse
- PedSim
- ShortestWalk
- 生态环境分析
- 景观地形分析
- Bison
- Groundhug
- 光热能量分析
- Heliotrope
- Clark's Crow
- Ladybug Tools
- Nightingale
- Solar Toolbox
- Sunflower
- 风环境分析
- Eddy
- ixCube CFD
- Swift
- 雨水径流分析
- Nudibranch
- 植物环境分析
- AiPlantCare
- Nero
- Pando
- 室内空间分析
- 热传递模拟
- Jerboa
- 自然通风模拟
- Eabbit
- Pigeon
- 综合指标可视化
- PlanBee
- 行为模拟分析
- 群集行为模拟
- Culebra
- Quelea
- Stella 3D
- 动态视域模拟
- Hawk
- 力学模拟分析
- 复杂力学模拟
- FlexHopper
- Kangaroo
- 简易力学模拟
- Linketix
- 光学模拟分析
- 非视觉照明模拟
- Lark Spectral Lighting
- 城市光污染模拟
- Reflector
- 声学模拟分析
- 噪声预测
- Pachyderm Acoustical Simulation
- 反射可视化
- Snail
- 分析平台协同
- ADS协同
- ArchiDynamics Plugin For Grasshopper
- MaxMSP协同
- Esquissons
- Photopia协同
- Photopia Optical Design for Rhino
- Procedural协同
- ProceduralCS
- 3.建模辅助类
- 建筑空间建模
- 城市生成
- City Generator
- EvoMass
- LiteTools
- Spheniscidae
- 屋顶生成
- Hible Foofs
- 空间布局生成
- Eelish
- Magnetizing Floor Plan Generator
- Termite Nest
- BIM
- BIM GeomGym IFC
- KettyBIM
- VisualARQ
- 幕墙设计
- PanelingTools
- SEG
- 钢结构设计
- BullAnt
- 景观环境建模
- 主要要素
- Docofossor
- Land Kit
- SandWorm
- 配景导入
- Auto Entourage
- Bubalus
- PhylloMachine
- Scatter
- 产品设计建模
- 医疗器械
- Rhino3DMedical
- 珠宝设计
- Peacock
- 三维扫描建模
- 点云处理
- Cockroach
- 数字算法建模
- 基础几何算法
- GeoDex
- LunchBox
- RhinoPolyhedra
- Riched GraphMapper
- Vipers
- 蚁群算法
- Rabbit
- 黏菌算法
- Nuclei
- Physarealm
- Slime
- 八皇后算法
- OctaTree
- 遗传算法
- Biomorpher
- Circle Packing算法
- Bee
- 离散算法
- Wasp
- Wasp++
- 体素算法
- Voxelizer
- Voxeltools
- 分形和混沌算法
- Chimpanzee
- 蒙德里安算法
- Chingree
- 波函数坍缩算法
- Monoceros
- 德洛内三角算法
- Super Delaunay
- Marching Cubes算法
- Cocoon
- 晶格算法
- Crystallon
- IntraLattice
- 凸包算法
- ExoSkeleton
- Voronoi算法
- Voronoize
- 极小曲面算法
- Minimal Surface Creator
- 噪声算法
- 4D Noise
- Noise
- 几何编辑工具
- 曲线工具
- Clipper for Grasshopper and Rhino
- Curve+
- 曲面工具
- Sasquatch Utilities
- Unify UVs
- XNurbs Rhino Plugin
- 网格工具
- Axolotl
- Carverino
- Chromodoris
- Mesh Curvature
- Mesh+
- Meshedit
- Meshtools
- Starling
- Stripper
- Weaverbird
- 变形工具
- Jackalope
- 标注工具
- Sandbox Topology
- 模型轻量化工具
- Dendro
- 剖面工具
- Section Box
- 纹理工具
- ShapeMap
- 颜色工具
- Color+
- 综合工具
- Hare
- Pufferfish
- WombatGH
- 建模平台协同
- Revit协同
- Grevit
- HummingBird
- RhinoInside.Revit
- ArchiCAD协同
- Rhinoceros-Archicad Connection
- CityEngine协同
- Puma
- SketchUp协同
- RhinoInside.SketchUp
- ZBrush协同
- Chameleon
- Houdini协同
- HouGh
- Kinect协同
- Tarsier
- 4.建造优化类
- 建造方式类型
- 3D打印建造
- Concre3DLab
- Droid
- Mamba
- SilkWorm
- 机械臂建造
- FURobot
- HAL
- HAL Robotics Framework
- KUKA
- Machina
- 建造结构类型
- 木结构建造
- Biber
- GluLamb
- Ngon
- Reindeer
- Timber Plate Structures
- 华夫饼结构建造
- Waffle
- 折纸建造
- Crane
- Oricut
- 乐高结构建造
- Legolizer
- 针织建造
- Cockatoo
- 结构找形优化
- 目标值优化
- Goat
- Octopus
- Opossum
- Wallacei
- 拓扑渐进找形优化
- Ameba
- 几何布局找形优化
- Peregrine
- 薄壳结构优化
- Millipede
- 桁架结构优化
- FDMopt
- Karamba 3D
- Phoenix3D
- TT Toolbox
- 双轴弯曲结构优化
- Emu
- 悬索结构优化
- 3D Graphic Statics
- 张拉膜结构优化
- Falcon
- 荷载变形优化
- FErret
- 建造出图排料
- 排序处理
- Duck
- 曲面展平
- Ivy
- 下料排版
- Group Nesting
- Hammerhead
- OpenNest
- 图纸导出
- PDF PLUS
- 建造平台协同
- IDEA StatiCa协同
- KarambaIDEA
- Dlubal RFEM协同
- Parametric FEM Toolbox
- FEM-Design Suite协同
- FEM-Design API Toolbox
- Consteel协同
- Pangolin
- Tekla协同
- TeklaLink
- OpenSees协同
- Alpaca4D
- 5.视觉表现类
- 可视化分析
- 数据可视化分析
- Conduit
- Mandrill
- Pterodactyl
- 几何可视化分析
- ArchiVision
- 视觉形态
- 二维形态
- [SPIRO]rat
- Attractor
- Bitmap+
- FlowL
- Graphic+
- Hedgehog
- Javid
- Parakeet
- Pebbles
- QuickDrawGH
- Rooster
- Shibalnu
- Sketch
- SymmetryArrow
- 三维形态
- Aviary
- Reflector
- Squid
- SuperMesh
- 动画
- 复杂动画设置
- Animation
- Cinnamon
- Eagle
- Flounder
- Heteroptera
- Horster
- Zebra
- 简易GIF生成
- Tapeworm
- 虚拟现实
- VR
- DixieVR
- Prospect by IrisVR
- AR
- RADii
- MR
- Fologram
- XR
- Project Shark
- 表现平台协同
- V-Ray协同
- Gray
- V-Ray for Rhino
- Three.js协同
- Three+
- Photoshop协同
- Shutterbug
- Illustrator协同
- Doodlebug
- 6.界面交互类
- 界面优化
- 电池布局优化
- AutoGraph
- SnappingGecko
- 电池显示优化
- Bifocals
- MetaHopper
- Parachute
- Place Holder Editor
- Sunglasses
- 电池连线优化
- ChopChop
- Magnifier
- pOd_GH_Button
- Riched Wire Types
- Telepathy
- UI优化
- Human UI
- Palette
- UI+
- 功能拓展
- Rhino联动
- Blindfold
- Mouse Rat
- Selectable Preview
- 远程多人协作
- RemoSharp
- 幻灯片展示
- Slideshow
- 自动保存
- AutoSavePlus
- 自由涂鸦
- Crayon
- Handy Tools
- 帮助提示
- Super Helper
- 趣味插件
- Ko-fi
- NaughtyComponents
- 7.人工智能类
- 机器学习
- 形态识别学习
- Alita
- 智能装配学习
- Assembly Sequence Predictor
- 智能排序学习
- Kohonen Map
- 自迭代深度学习
- Crow
- Dodo
- Pug
- Tunny
- 模糊逻辑学习
- Angora2
- OpenAI训练学习
- Ambrosinus Toolkit
- OpenAI for Grasshopper
- 硬件驱动
- 空间3D捕捉
- Azure Kinect GH
- Catwalk
- 传感器控制
- AxiDraw Control
- CHORA Network
- Cicada
- Coreus
- Firefly
- Heteroduino
- 8.代码编程类
- 语言类型
- Python相关
- GH Python Remote
- GH_CPython
- Processing相关
- gHowl
- 共享平台
- GH电池共享
- ShapeDiver
- 上传GitHub
- Githopper
- 三.GH常见问题Q&A
- 1.怎样更改电池的输入输出端名称?
- 2.为什么有的时候两条直线明明相交却无法求交点?
- 3.点坐标和向量坐标的格式是完全一样的吗?
- 4.如何输入自然常数e?
- 5.“*”和“?”可以在组名中做通配符使用吗?
- 6.如何保留小数位数?
- 7.电池输入端右键菜单的Extract parameter是做什么的?
- 8.如果想在两个电池之间增加空间加入新电池,有没有好的快速操作方法?
- 9.能否将复制的电池组,在粘贴的时候,自动定位在新视口中央?
- 10.GH内是否可以根据连线逻辑快速选择电池?
- 11.对有颜色的物件加工时,如何将电脑颜色与实际具有的色彩进行归类近似匹配?
- 12.有的GH电池运算量太大,打不开怎么办?
- 13.用Ladybug做日照辐射分析,GenCumulativeSkyMtx电池无法工作怎么办?
- 14.GH拾取的网格如何取消显示红色网格结构线?
- 15.如何统一一系列连续曲面的UV方向以及法线方向?
- 16.如何筛选出一个数列中指定精确度的数字?
- 17.如何在GH中偏移多重曲面?
- 18.如何调换曲面UV方向?
- 19.yak格式的GH插件如何安装和卸载?
- 20.使用Eddy3D做风环境模拟有电池报错怎么办?
- 21.用Ladybug&Honeybee做日照相关分析出现大面积无效0值是什么原因?
- 22.GH生成大量Surface速度非常慢怎么办?
- 23.如何在曲线上指定点的两侧找等弧长对称点?
- 24.两个树形数据之间运算必须保证组数完全一致吗?
- 25.Isotrim无法对目标曲面进行正确网格划分是什么原因?
- 26.如何做异形曲面的网架结构?
- 27.如何用GH提取并计算一张图片中的颜色比例?
- 28.如何将Excel的内容导入GH?
- 更新日志
- 下载声明
- 联系作者