## :-: **FURobot**
:-: 
### :-: [点击下载插件](https://pan.baidu.com/s/1zKH3SF_dYCw9dmAxAPkp-w?pwd=hiqp)
**作者:**
by FabUnion
**官网:**
https://fabunion.github.io/
**简介:**
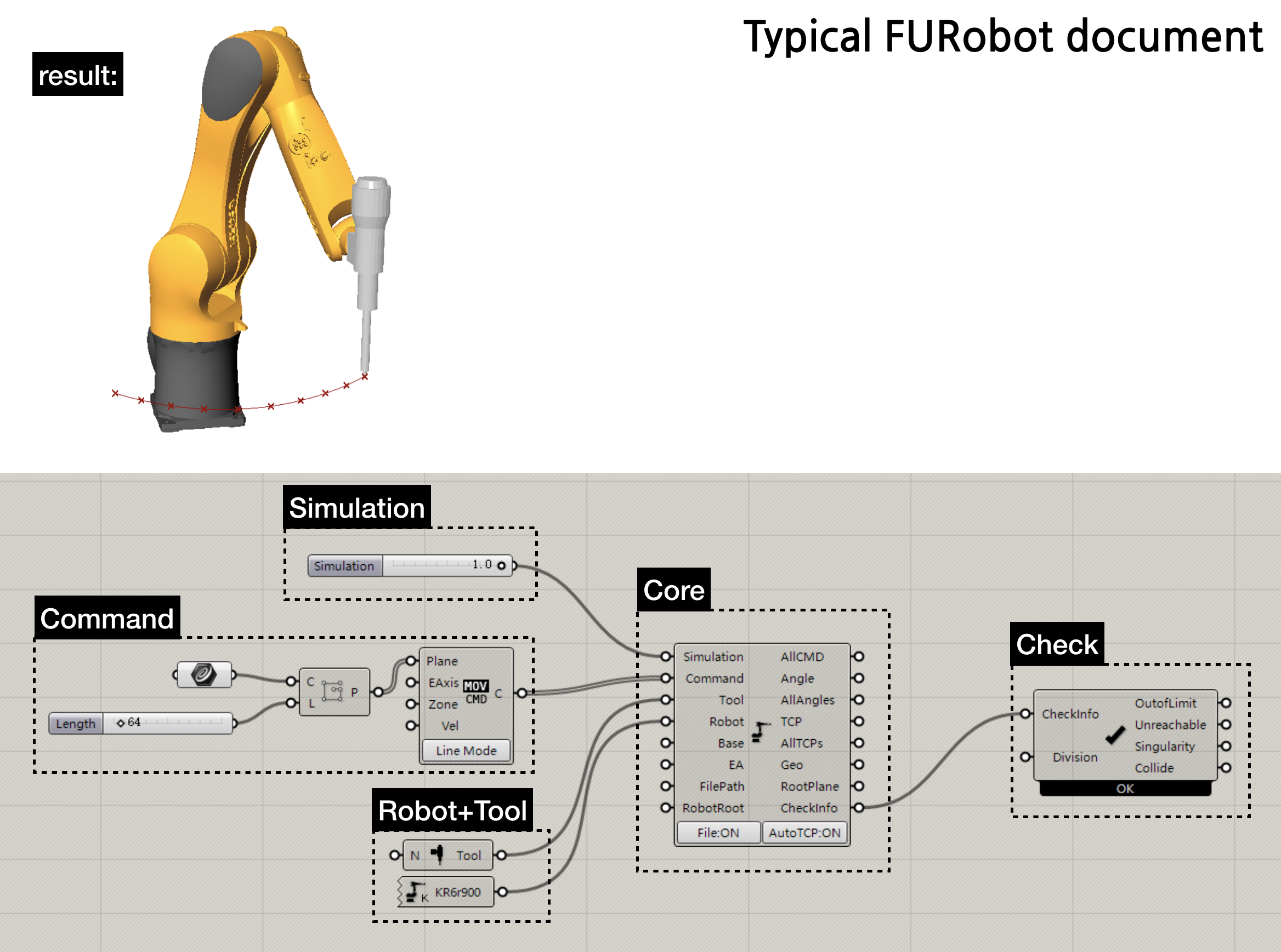
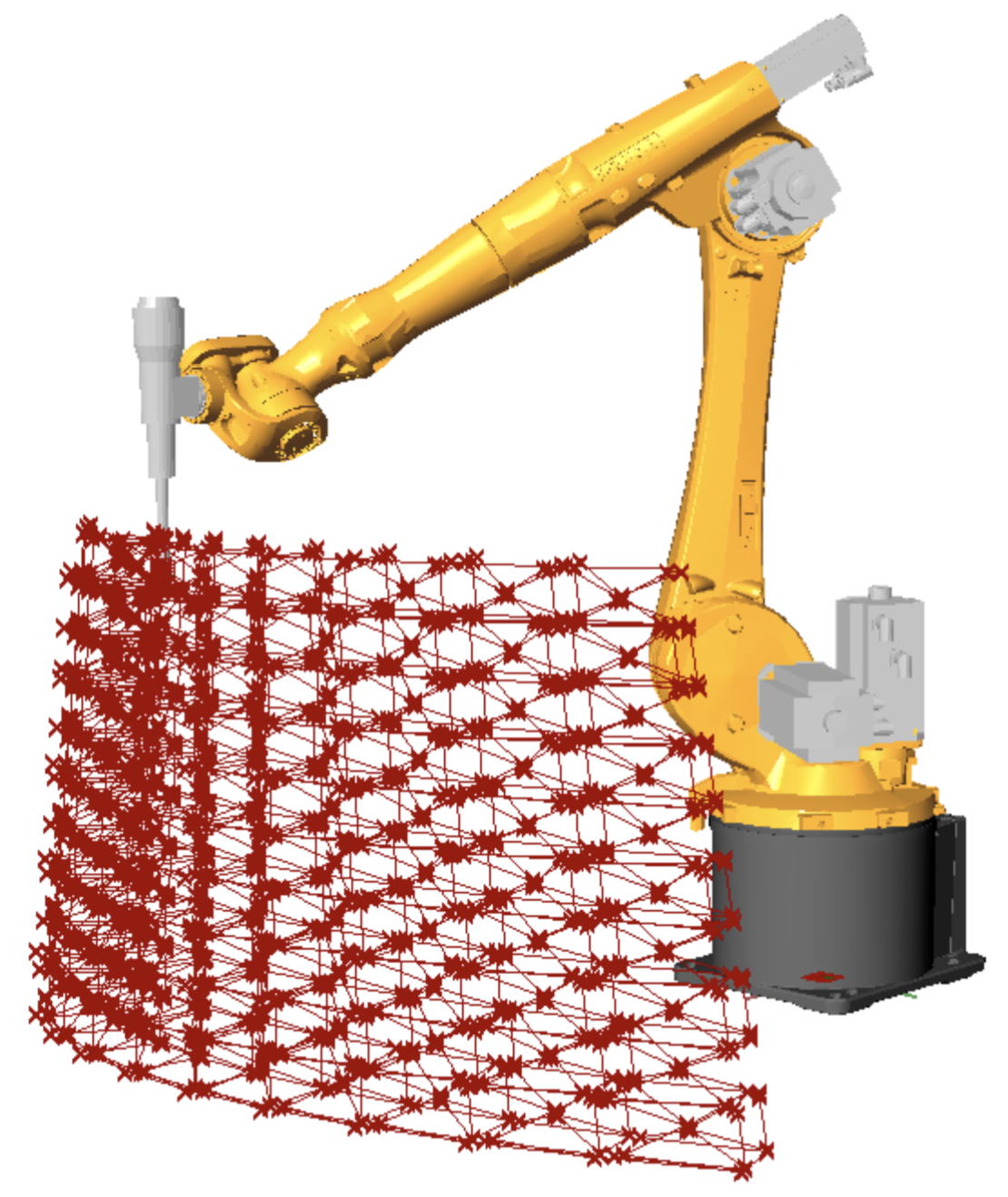
FUROBOT作为FabUninon开发的一款整合型控制机械臂的插件,能够在可视化编程的同时,也能在Rhino中对机械臂的运动方式以及路径等进行同步的仿真模拟,以解决无法直接操控建筑机器人的技术难题。KUKA |prc因为仅支持KUKA厂家的机器人,且不能自定义多轴外部轴;而HAL虽然支持KUKA,ABB以及UR的机器但是因为不能自定义硬件且操作较为复杂,对于机械臂的入门学者以及中阶使用者带来了一定的限制。FUROBOT则综合解决了以上的问题以支持不同厂商、不同型号的机器人,且能自定义扩充机器人的外部轴与工具头库,并且与其他用户分享。很大程度上帮助用户实现了数字建造的快速实验模拟与部署。
FUROBOT作为一款基于Grasshopper的软件,它能够在可视化编程的同时,于Rhinoceros中进行同步的仿真模拟。通过FUROBOT,建筑师可以解决无法直接操控建筑机器人的技术难题。对于建筑机器人软件的研发,能够有效降低机器人操作的门槛,使得建筑师、施工方或者普通的建筑工人,都能通过简单的操作来设定机器人去执行不同的工艺流程。
* KUKA、ABB、UR和外部axis的模拟、生成离线程序、通信(wip)
* 运动检查
* 四元数、欧拉角、轴角、矩阵的数学工具
* 3d打印+木材+风+空间结构的技术包
* ABB&KUKA通信和控制
**示意图:**

- 简介
- 序言
- 使用说明
- 版权证书
- 词典版本介绍
- 一.GH原生电池(完整884个)
- Params类
- Geometry组
- Point★
- Vector
- Circle
- Circular Arc
- Curve★
- Line
- Plane
- Retangle
- Box
- Brep★
- Mesh★
- Mesh Face
- SubD
- Surface★
- Twisted Box
- Field
- Geometry★
- Geometry Cache
- Geometry Pipeline
- Group
- Transform
- Primitive组
- Boolean
- Integer★
- Number★
- Text★
- Colour
- Complex
- Culture
- Domain
- Domain²
- Guid
- Metrix
- Time
- Data★
- Data Path
- File Path★
- Shader
- Input组
- Number Slider★
- Panel★
- Boolean Toggle★
- Button★
- Control Knob
- Digit Scroller
- MD Slider
- Value List
- Calendar
- Clock
- Colour Picker
- Color Swatch★
- Colour Wheel
- Gradient★
- Graph Mapper★
- Image Sample★
- Atom Data
- Image Resource
- Import 3DM
- Import Coordinates
- Import Image
- Import PDB
- Import SHP★
- Object Details
- Read File
- Util组
- Cherry Picker
- Jump
- Param Viewer★
- Scribble★
- Data Dam
- Data Recorder★
- Relay
- Suirify
- Trigger
- Cluster Input★
- Cluster Output★
- Data Input
- Data Output
- Context Bake
- Context Print
- Get Geometry
- Get Integer
- Get Line
- Get Number
- Get Point
- Get String
- Fitness Landscape
- Galapagos★
- Gene Pool★
- Maths类
- Domain组
- Construct Domain★
- Deconstruct Domain★
- Bounds★
- Consecutive Domains★
- Divide Domain
- Find Domain★
- Includes★
- Remap Numbers★
- Construct Domain²
- Construct Domain²
- Deconstruct Domain²
- Deconstruct Domain²
- Bounds 2D
- Divide Domain²★
- Matrix组
- Construct Matrix
- Deconstruct Matrix
- Display Matrix
- Invert Matrix
- Transpose Matrix
- Swap Columns
- Swap Rows
- Operators组
- Addition★
- Division★
- Multiplication★
- Negative★
- Power★
- Subtraction★
- Absolute★
- Factorial
- Mass Addition★
- Larger Than★
- Smaller Than★
- Equality★
- Integer Division★
- Modulus★
- Mass Multiplication★
- Relative Differences
- Similarity★
- Gate And
- Gate Not
- Gate Or
- Gate Xor
- Gate Majority
- Gate Nand
- Gate Nor
- Gate Xnor
- Polynomials组
- Cube★
- Cube Root
- Square★
- Square Root
- One Over X★
- Power of 10
- Power of 2
- Power of E
- Log N
- Logarithm
- Natural Logarithm
- Script组
- Evaluate★
- Expression★
- C# Script
- GHPython Script
- VB Script
- Time组
- Construct Date
- Construct Exotic Date
- Construct Smooth Time
- Construct Time
- Deconstruct Date
- Combine Date & Time
- Date Range
- Interpolate Date
- Trig组
- Cosine★
- Sinc
- Sine★
- Tangent★
- ArcCosine
- ArcSine
- ArcTangent
- CoSecant
- CoTangent
- Secant
- Degrees★
- Radians★
- Right Trigonometry
- Triangle Trigonometry
- Centroid
- Circumcentre
- Incentre
- Orthocentre
- Util组
- Epsilon
- Golden Ratio★
- Natural logarithm
- Pi★
- Extremes
- Maximum★
- Minimum★
- Round★
- Average★
- Blur Numbers
- Interpolate data
- Smooth Numbers★
- Truncate
- Weighted Average
- Complex Argument
- Complex Components
- Complex Conjujate
- Complex Modulus
- Create Complex
- Sets类
- List组
- Insert Items★
- Item Index
- List Item★
- List Length★
- Partition List★
- Replace Items
- Reverse List
- Shift List★
- Sort List★
- Split List★
- Sub List★
- Dispatch★
- Null Item★
- Pick'n'Choose★
- Replace Nulls
- Weave★
- Combine Data
- Sift Pattern
- Cross Reference
- Longest List
- Shortest List
- Sequence组
- Cull Index★
- Cull Nth
- Cull Pattern★
- Random Reduce★
- Char Sequence
- Duplicate Data★
- Fibonacci★
- Range★
- Repeat Data★
- Sequence
- Series★
- Stack Data
- Jitter★
- Random★
- Sets组
- Create Set★
- Delete Consecutive★
- Find similar number★
- Member Index★
- Set Difference
- Set Difference(S)
- Set Intersection
- Set Majority
- Set Union
- Carthesian Product
- Replace Members★
- SubSet
- Disjoint
- Key/Value Search
- Text组
- Characters
- Concatenate★
- Text Join
- Text Length
- Text Split★
- Format
- Text Case
- Text Fragment
- Text Trim
- Match Text
- Replace Text★
- Sort Text★
- Text Distance
- Text On Surface
- Tree组
- Clean Tree★
- Flatten Tree★
- Graft Tree★
- Prune Tree
- Simplify Tree
- Tree Statistics★
- Trim Tree
- Unflatten Tree
- Entwine★
- Explode Tree★
- Flip Metrix★
- Merge★
- Match Tree
- Path Mapper★
- Shift Paths★
- Split Tree
- Stream Filter★
- Stream Gate★
- Relative Item
- Relative Items
- Tree Branch★
- Tree Item
- Construct Path
- Deconstruct Path
- Path Compare
- Replace Paths★
- Vector类
- Field组
- Line Charge
- Point Charge
- Spin Force
- Vector Force
- Break Field
- Merge Fields
- Evaluate Field
- Field Line
- Direction Display
- Perpendicular Display
- Scalar Display
- Tensor Display
- Grid组
- Hexagonal
- Radial
- Rectangular★
- Square★
- Triangular
- Populate 2D★
- Populate 3D★
- Populate Geometry★
- Plane组
- Deconstruct Plane★
- XY Plane★
- XZ Plane★
- YZ Plane★
- Construct Plane★
- Line + Line★
- Line + Pt★
- Plane 3Pt
- Plane Fit
- Plane Normal★
- Plane Offset
- Plane Origin★
- Adjust Plane
- Align Plane★
- Align Planes★
- Flip Plane
- Plane Closest Point
- Plane Coordinates
- Rotate Plane
- Point组
- Construct Point★
- Deconstruct★
- Numbers to Points
- Points to Numbers
- Barycentric
- Distance★
- Point Cylindrical
- Point Oriented
- Point Polar
- To Polar
- Closest Point★
- Closest Points★
- Cull Duplicates★
- Point Groups
- Project Point★
- Pull Point★
- Sort Along Curve
- Sort Points
- Vector组
- Deconstruct Vector★
- Vector XYZ★
- Unit X★
- Unit Y★
- Unit Z★
- Amplitude★
- Angle★
- Vector 2Pt★
- Unit Vector
- Cross Product
- Dot Product
- Reverse
- Rotate
- Vector Length★
- Curve类
- Analysis组
- Control Points
- Control Polygon
- Curve Middle
- Deconstruct Arc★
- Deconstruct Rectangle
- End Points★
- Polygon Center★
- Closed
- Curvature Graph
- Curve Closest Point★
- Curve Nearest Object
- Curve Proximity
- Curve Side
- Discontinuity★
- Extremes
- Planar
- Curvature
- Curve Frame★
- Derivatives
- Evaluate Curve★
- Horizontal Frame★
- Perp Frame★
- Point On Curve★
- Torsion
- Curve Domain
- Evaluate Length
- Length★
- Length Domain
- Length Parameter
- Segment Lengths
- Point In Curve★
- Point in Curves★
- Division组
- Contour★
- Contour(ex)★
- Dash Pattern★
- Divide Curve★
- Divide Distance★
- Divide Length★
- Shatter★
- Curve Frames★
- Horizontal Frames★
- Perp Frames★
- Primitive组
- Fit Line
- Line★
- Line 2Plane
- Line 4Pt
- Line SDL★
- Tangent Lines
- Tangent Lines(Ex)
- Tangent Lines(In)
- Circle★
- Circle 3Pt
- Circle CNR
- Circle Fit
- Circle TanTan
- Circle TanTanTan
- Ellipse★
- InCircle
- InEllipse
- Arc
- Arc 3Pt
- Arc SED
- BiArc
- Modified Arc
- Tangent Arcs
- Polygon★
- Polygon Edge
- Rectangle★
- Retangle 2Pt
- Retangle 3Pt
- Spline组
- Bezier Span
- Interpolate★
- Interpolate(t)
- Kinky Curve
- Nurbs Curve★
- PolyArc
- PolyLine★
- Tangent Curve
- Curve On Surface
- Geodesic
- Iso Curve★
- Sub Curve★
- Tween Curve★
- Knot Vector
- Nurbs Curve PWK
- Blend Curve
- Blend Curve Pt
- Catenary
- Connect Curves
- Util组
- Explode★
- Extend Curve★
- Flip Curve★
- Join Curves★
- Fillet
- Fillet★
- Fillet Distance
- Offset Curve★
- Offset Curve Loose
- Offset on Srf
- Project★
- Pull Curve
- Seam
- Curve To Polyline
- Fit Curve
- Polyline Collapse
- Rebuild Curve
- Reduce
- Simplify Curve
- Smooth Polyline★
- Surface类
- Analysis组
- Box Corners
- Box Properties
- Deconstruct Box
- Evaluate Box
- Brep Edges★
- Brep Topology
- Brep Wireframe
- Deconstruct Brep★
- Dimensions★
- Is Planar
- Surface Points
- Area★
- Area Moments
- Volume★
- Volume Moments
- Brep Closest Point★
- Surface Closest Point★
- Point In Brep★
- Point In Breps★
- Point In Trim
- Shape In Brep
- Evaluate Surface★
- Osculating Circles
- Principal Curvature
- Surface Curvature
- Freeform组
- 4Pt Surface
- Surface From Points★
- Boundary Surfaces★
- Control Point Loft
- Edge Surface★
- Fit Loft
- Loft★
- Loft Options★
- Network Surface
- Ruled Surface
- Sum Surface
- Extrude★
- Extrude Along
- Extrude Linear
- Fragment Patch
- Patch★
- Pipe★
- Pipe Variable
- Sweep1★
- Sweep2★
- Rail Revolution
- Revolution
- Extrude Point
- Primitive组
- Plane Surface★
- Plane Through Shape
- Bounding Box★
- Box 2Pt
- Box Rectangle
- Center Box★
- Domain Box
- Cone
- Cylinder★
- Quad Sphere
- Sphere★
- Sphere 4Pt
- Sphere Fit
- SubD组
- Mesh from SubD
- SubD from Mesh
- MultiPipe
- SubD Control Polygon
- SubD Edges
- SubD Fuse
- SubD Vertices
- SubD Edge Tags
- SubD Vertex Tags
- Util组
- Divide Surface★
- Surface Frames★
- Copy Trim★
- Isotrim★
- Retrim
- Untrim
- Brep Join★
- Cap Holes★
- Cap Holes Ex
- Merge Faces★
- Flip
- Offset Surface★
- Offset Surface Loose
- Convex Edges
- Edges from Directions
- Edges from Faces
- Edges from Length
- Edges from Linearity
- Edges from Points
- Fillet Edge
- Mesh类
- Analysis组
- Deconstruct Face★
- Deconstruct Mesh★
- Face Normals★
- Mesh ConvertQuads
- Mesh Edges★
- Mesh Explode★
- Mesh Triangulate
- Face Boundaries★
- Face Circles
- Mesh Inclusion★
- Mesh Area★
- Mesh Closest Point★
- Mesh Eval★
- Mesh NakedEdge
- Mesh Volume★
- Mesh AddAttributes
- Mesh ExtractAttributes
- Primitive组
- Construct Mesh★
- Mesh Colours★
- Mesh Quad★
- Mesh Spray★
- Mesh Triangle★
- Mesh Box★
- Mesh Pipe★
- Mesh Plane★
- Mesh Sphere★
- Mesh Sphere Ex
- Mesh Sweep★
- Triangulation组
- Convex Hull
- Delaunay Edges
- Delaunay Mesh★
- Substrate★
- Facet Dome
- Voronoi★
- Voronoi 3D
- Voronoi Cell★
- Voronoi Groups
- OcTree
- Proximity 2D
- Proximity 3D
- QuadTree
- MetaBall★
- MetaBall(t)
- MetaBall(t) Custom
- 3D ConvexHull
- 3D Delaunay
- 3D DelaunayCell
- 3D Voronoi
- Convex Hull Points
- Quad Remesh★
- Quad Remesh Settings★
- TriRemesh★
- Util组
- Mesh Brep★
- Mesh FromPoints★
- Mesh Surface
- Settings(Custom)★
- Settings(Quality)★
- Settings(Speed)★
- Simple Mesh★
- Blur Mesh
- Cull Faces
- Cull Vertices
- Delete Faces
- Delete Vertices
- Disjoint Mesh★
- Mesh Join★
- Mesh Shadow★
- Mesh Split Plane
- Smooth Mesh★
- Align Vertices
- Flip Mesh
- Mesh CullUnused Vertices
- Mesh Flip
- Mesh UnifyNormals
- Mesh WeldVertices★
- Quadrangulate
- Triangulate
- Unify Mesh
- Unweld Mesh
- Weld Mesh
- Exposure
- Occlusion
- Intersect类
- Mathematical组
- Brep / Line★
- Curve / Line★
- Line / Line
- Mesh / Ray★
- Surface / Line★
- Brep / Plane
- Contour★
- Contour(ex)
- Curve / Plane
- Line / Plane
- Mesh / Plane
- Plane / Plane
- Plane / Plane / Plane
- Plane Region
- IsoVist★
- IsoVist Ray★
- Physical组
- Curve / Curve★
- Mesh / Curve★
- Brep / Brep★
- Surface Split★
- Curve / Self★
- Multiple Curves★
- Brep / Curve★
- Surface / Curve★
- Mesh / Mesh★
- Clash
- Collision Many/Many
- Collision One/Many
- Region组
- Split with Brep
- Split with Breps
- Trim with Brep
- Trim with Breps
- Trim with Region
- Trim with Regions
- Shape组
- Boundary Volume
- Solid Difference
- Solid Intersection
- Solid Union★
- Split Brep
- Split Brep Multiple
- Trim Solid
- Region Difference
- Region Intersection
- Region Union★
- Mesh Difference
- Mesh Intersection
- Mesh Split
- Mesh Union★
- Box Slits
- Region Slits
- Transform类
- Affine组
- Camera Obscura
- Scale★
- Scale NU★
- Shear
- Shear Angle
- Box Mapping
- Orient Direction
- Project★
- Project Along★
- Rectangle Mapping
- Triangle Mapping
- Array组
- Box Array★
- Curve Array★
- Linear Array
- Polar Array
- Rectangular Array★
- Kaleidoscope
- Euclidean组
- Mirror★
- Move★
- Move Away From
- Move To Plane
- Orient★
- Rotate★
- Rotate 3D★
- Rotate Axis★
- Rotate Direction
- Morph组
- Blend Box
- Box Morph★
- Surface Box★
- Twisted Box
- Bend Deform
- Flow★
- Maelstrom
- Mirror Curve
- Mirror Surface
- Splop
- Sporph★
- Stretch
- Surface Morph
- Taper
- Twist
- Map to Surface
- Point Deform
- Spatial Deform
- Spatial Deform(custom)
- Util组
- Compound
- Split
- Inverse Transform
- Transform
- Transform Metrix
- Group★
- Ungroup★
- Merge Group
- Split Group
- Display类
- Colour组
- Colour CMYK
- Colour HSL
- Colour HSV
- Colour L*ab
- Colour LCH
- Colour RGB
- Colour RGB(f)
- Colour XYZ
- Split AHSL
- Split AHSV
- Split ARGB
- Dimensions组
- Gradient Hatch★
- Pattern Hatch★
- Text Tag
- Text Tag 3D★
- Aligned Dimension
- Line Dimension★
- Linear Dimension
- Marker Dimension
- Serial Dimension
- Angular Dimension★
- Angular Dimensions(Mesh)
- Arc Dimension
- Circular Dimension
- Make2D
- Make2D Parallel View
- Make2D Perspective View
- Make2D Rhino View
- Graphs组
- Bar Graph
- Legend★
- Pie Chart
- Quick Graph
- Image Gallery
- Value Tracker
- Preview组
- Create Material★
- Custom Preview★
- Cloud Display
- Dot Display★
- Symbol(Advanced)
- Symbol(Simple)
- Symbol Display
- Vector组
- Point List★
- Point Order
- Vector Display★
- Vector Display Ex★
- 内置插件:Kangaroo2
- Goals-6dof组
- AlignFaces
- Beam
- Concentric
- RigidBody
- RigidBodyCollide
- RigidPointSet
- SolidPlaneCollide
- Support
- Goals-Angle组
- Angle
- AngleSnap
- ClampAngle
- EqualAngle
- G2
- Rod
- Goals-Co组
- CoCircular
- CoLinear
- CoPlanar
- CoSpherical
- Goals-Col组
- Collider
- CurveCollide
- CurvePointCollide
- ImageCircles
- SoftBodyCollide
- SolidPointCollide
- SphereCollide
- Goals-Lin组
- ClampLength
- ConstantTension
- Direction
- DynamicWeight1d
- EqualLength
- Length(Line)
- LengthRatio
- LengthSnap
- PlasticLength
- Goals-Mesh组
- Conicalize
- CyclicQuad
- Developablize
- EdgeLengths
- Hinge
- Isothermic
- LiveSoap
- NoFoldThrough
- Planarize
- PlasticHinge
- PolygonArea
- Pressure
- Smooth
- SoapFilm
- TangentialSmooth
- TangentIncircles
- VertexLoads
- Volume
- Wind
- Goals-On组
- OnCurve
- OnMesh
- OnPlane
- Goals-Pt组
- Anchor
- AnchorXYZ
- Bomb
- Coincident
- Floor
- FloorFriction
- Load
- MagnetSnap
- PlasticAnchor
- Transform
- Main组
- BouncySolver
- Grab
- Show
- Soft&Hard Solver
- Solver
- StepSolver
- ZombieSolver
- Mesh组
- Bipartite
- ByParent
- Checkerboard
- Combine&Clean
- Diagonalize
- FaceFaceOffset
- FoldAngle
- HingePoints
- MeshCorners
- MeshDirection
- MeshMap
- MeshTurn
- NakedVertices
- PlanarityAnalysis
- Refine
- RefineStrips
- RemeshByColour
- Stripper
- TangentCircles
- Unroller
- VertexNeighbours
- WarpWeft
- Utility组
- DotDisplay
- interconnectPoints
- Möbius transformation
- removeDuplicateLines
- removeDuplicatePts
- SplitAtCorners
- 二.GH插件分类介绍(精选291个)
- 1.数据处理类
- 地理空间数据
- OSM数据源
- Caribou
- ELK
- Gismo
- Meerkat GIS
- Urbano
- GIS数据源
- @it
- GHopperGIS
- GHSHP
- Heron
- Ibex
- 虚拟网络数据
- 社交数据
- Mosquito
- 金融数据
- Squirrel
- 程序过程数据
- 迭代计算
- Anemone
- HoopSnake
- 单位换算
- Caterpillar
- 复杂数据结构
- EdiTree
- Treesloth
- 几何属性编辑
- EleFront
- Fabtools
- Human
- 多线程环境设置
- Impala
- Jason提取
- jSwan
- 数据平台协同
- Excel协同
- Bumblebee
- Google Firebase协同
- Firehopper
- sMath Studio协同
- ghMath
- 2.分析模拟类
- 城市空间分析
- 城市功能布局
- Chameleon.tools
- DecodingSpaces
- 城市空间句法
- Numeric Network Analysis
- SmartSpaceAnalyser
- SpaceChase
- Syntactic
- 路径交通模拟
- Dog
- Geodesic lines on mesh
- LeafVein
- Mouse
- PedSim
- ShortestWalk
- 生态环境分析
- 景观地形分析
- Bison
- Groundhug
- 光热能量分析
- Heliotrope
- Clark's Crow
- Ladybug Tools
- Nightingale
- Solar Toolbox
- Sunflower
- 风环境分析
- Eddy
- ixCube CFD
- Swift
- 雨水径流分析
- Nudibranch
- 植物环境分析
- AiPlantCare
- Nero
- Pando
- 室内空间分析
- 热传递模拟
- Jerboa
- 自然通风模拟
- Eabbit
- Pigeon
- 综合指标可视化
- PlanBee
- 行为模拟分析
- 群集行为模拟
- Culebra
- Quelea
- Stella 3D
- 动态视域模拟
- Hawk
- 力学模拟分析
- 复杂力学模拟
- FlexHopper
- Kangaroo
- 简易力学模拟
- Linketix
- 光学模拟分析
- 非视觉照明模拟
- Lark Spectral Lighting
- 城市光污染模拟
- Reflector
- 声学模拟分析
- 噪声预测
- Pachyderm Acoustical Simulation
- 反射可视化
- Snail
- 分析平台协同
- ADS协同
- ArchiDynamics Plugin For Grasshopper
- MaxMSP协同
- Esquissons
- Photopia协同
- Photopia Optical Design for Rhino
- Procedural协同
- ProceduralCS
- 3.建模辅助类
- 建筑空间建模
- 城市生成
- City Generator
- EvoMass
- LiteTools
- Spheniscidae
- 屋顶生成
- Hible Foofs
- 空间布局生成
- Eelish
- Magnetizing Floor Plan Generator
- Termite Nest
- BIM
- BIM GeomGym IFC
- KettyBIM
- VisualARQ
- 幕墙设计
- PanelingTools
- SEG
- 钢结构设计
- BullAnt
- 景观环境建模
- 主要要素
- Docofossor
- Land Kit
- SandWorm
- 配景导入
- Auto Entourage
- Bubalus
- PhylloMachine
- Scatter
- 产品设计建模
- 医疗器械
- Rhino3DMedical
- 珠宝设计
- Peacock
- 三维扫描建模
- 点云处理
- Cockroach
- 数字算法建模
- 基础几何算法
- GeoDex
- LunchBox
- RhinoPolyhedra
- Riched GraphMapper
- Vipers
- 蚁群算法
- Rabbit
- 黏菌算法
- Nuclei
- Physarealm
- Slime
- 八皇后算法
- OctaTree
- 遗传算法
- Biomorpher
- Circle Packing算法
- Bee
- 离散算法
- Wasp
- Wasp++
- 体素算法
- Voxelizer
- Voxeltools
- 分形和混沌算法
- Chimpanzee
- 蒙德里安算法
- Chingree
- 波函数坍缩算法
- Monoceros
- 德洛内三角算法
- Super Delaunay
- Marching Cubes算法
- Cocoon
- 晶格算法
- Crystallon
- IntraLattice
- 凸包算法
- ExoSkeleton
- Voronoi算法
- Voronoize
- 极小曲面算法
- Minimal Surface Creator
- 噪声算法
- 4D Noise
- Noise
- 几何编辑工具
- 曲线工具
- Clipper for Grasshopper and Rhino
- Curve+
- 曲面工具
- Sasquatch Utilities
- Unify UVs
- XNurbs Rhino Plugin
- 网格工具
- Axolotl
- Carverino
- Chromodoris
- Mesh Curvature
- Mesh+
- Meshedit
- Meshtools
- Starling
- Stripper
- Weaverbird
- 变形工具
- Jackalope
- 标注工具
- Sandbox Topology
- 模型轻量化工具
- Dendro
- 剖面工具
- Section Box
- 纹理工具
- ShapeMap
- 颜色工具
- Color+
- 综合工具
- Hare
- Pufferfish
- WombatGH
- 建模平台协同
- Revit协同
- Grevit
- HummingBird
- RhinoInside.Revit
- ArchiCAD协同
- Rhinoceros-Archicad Connection
- CityEngine协同
- Puma
- SketchUp协同
- RhinoInside.SketchUp
- ZBrush协同
- Chameleon
- Houdini协同
- HouGh
- Kinect协同
- Tarsier
- 4.建造优化类
- 建造方式类型
- 3D打印建造
- Concre3DLab
- Droid
- Mamba
- SilkWorm
- 机械臂建造
- FURobot
- HAL
- HAL Robotics Framework
- KUKA
- Machina
- 建造结构类型
- 木结构建造
- Biber
- GluLamb
- Ngon
- Reindeer
- Timber Plate Structures
- 华夫饼结构建造
- Waffle
- 折纸建造
- Crane
- Oricut
- 乐高结构建造
- Legolizer
- 针织建造
- Cockatoo
- 结构找形优化
- 目标值优化
- Goat
- Octopus
- Opossum
- Wallacei
- 拓扑渐进找形优化
- Ameba
- 几何布局找形优化
- Peregrine
- 薄壳结构优化
- Millipede
- 桁架结构优化
- FDMopt
- Karamba 3D
- Phoenix3D
- TT Toolbox
- 双轴弯曲结构优化
- Emu
- 悬索结构优化
- 3D Graphic Statics
- 张拉膜结构优化
- Falcon
- 荷载变形优化
- FErret
- 建造出图排料
- 排序处理
- Duck
- 曲面展平
- Ivy
- 下料排版
- Group Nesting
- Hammerhead
- OpenNest
- 图纸导出
- PDF PLUS
- 建造平台协同
- IDEA StatiCa协同
- KarambaIDEA
- Dlubal RFEM协同
- Parametric FEM Toolbox
- FEM-Design Suite协同
- FEM-Design API Toolbox
- Consteel协同
- Pangolin
- Tekla协同
- TeklaLink
- OpenSees协同
- Alpaca4D
- 5.视觉表现类
- 可视化分析
- 数据可视化分析
- Conduit
- Mandrill
- Pterodactyl
- 几何可视化分析
- ArchiVision
- 视觉形态
- 二维形态
- [SPIRO]rat
- Attractor
- Bitmap+
- FlowL
- Graphic+
- Hedgehog
- Javid
- Parakeet
- Pebbles
- QuickDrawGH
- Rooster
- Shibalnu
- Sketch
- SymmetryArrow
- 三维形态
- Aviary
- Reflector
- Squid
- SuperMesh
- 动画
- 复杂动画设置
- Animation
- Cinnamon
- Eagle
- Flounder
- Heteroptera
- Horster
- Zebra
- 简易GIF生成
- Tapeworm
- 虚拟现实
- VR
- DixieVR
- Prospect by IrisVR
- AR
- RADii
- MR
- Fologram
- XR
- Project Shark
- 表现平台协同
- V-Ray协同
- Gray
- V-Ray for Rhino
- Three.js协同
- Three+
- Photoshop协同
- Shutterbug
- Illustrator协同
- Doodlebug
- 6.界面交互类
- 界面优化
- 电池布局优化
- AutoGraph
- SnappingGecko
- 电池显示优化
- Bifocals
- MetaHopper
- Parachute
- Place Holder Editor
- Sunglasses
- 电池连线优化
- ChopChop
- Magnifier
- pOd_GH_Button
- Riched Wire Types
- Telepathy
- UI优化
- Human UI
- Palette
- UI+
- 功能拓展
- Rhino联动
- Blindfold
- Mouse Rat
- Selectable Preview
- 远程多人协作
- RemoSharp
- 幻灯片展示
- Slideshow
- 自动保存
- AutoSavePlus
- 自由涂鸦
- Crayon
- Handy Tools
- 帮助提示
- Super Helper
- 趣味插件
- Ko-fi
- NaughtyComponents
- 7.人工智能类
- 机器学习
- 形态识别学习
- Alita
- 智能装配学习
- Assembly Sequence Predictor
- 智能排序学习
- Kohonen Map
- 自迭代深度学习
- Crow
- Dodo
- Pug
- Tunny
- 模糊逻辑学习
- Angora2
- OpenAI训练学习
- Ambrosinus Toolkit
- OpenAI for Grasshopper
- 硬件驱动
- 空间3D捕捉
- Azure Kinect GH
- Catwalk
- 传感器控制
- AxiDraw Control
- CHORA Network
- Cicada
- Coreus
- Firefly
- Heteroduino
- 8.代码编程类
- 语言类型
- Python相关
- GH Python Remote
- GH_CPython
- Processing相关
- gHowl
- 共享平台
- GH电池共享
- ShapeDiver
- 上传GitHub
- Githopper
- 三.GH常见问题Q&A
- 1.怎样更改电池的输入输出端名称?
- 2.为什么有的时候两条直线明明相交却无法求交点?
- 3.点坐标和向量坐标的格式是完全一样的吗?
- 4.如何输入自然常数e?
- 5.“*”和“?”可以在组名中做通配符使用吗?
- 6.如何保留小数位数?
- 7.电池输入端右键菜单的Extract parameter是做什么的?
- 8.如果想在两个电池之间增加空间加入新电池,有没有好的快速操作方法?
- 9.能否将复制的电池组,在粘贴的时候,自动定位在新视口中央?
- 10.GH内是否可以根据连线逻辑快速选择电池?
- 11.对有颜色的物件加工时,如何将电脑颜色与实际具有的色彩进行归类近似匹配?
- 12.有的GH电池运算量太大,打不开怎么办?
- 13.用Ladybug做日照辐射分析,GenCumulativeSkyMtx电池无法工作怎么办?
- 14.GH拾取的网格如何取消显示红色网格结构线?
- 15.如何统一一系列连续曲面的UV方向以及法线方向?
- 16.如何筛选出一个数列中指定精确度的数字?
- 17.如何在GH中偏移多重曲面?
- 18.如何调换曲面UV方向?
- 19.yak格式的GH插件如何安装和卸载?
- 20.使用Eddy3D做风环境模拟有电池报错怎么办?
- 21.用Ladybug&Honeybee做日照相关分析出现大面积无效0值是什么原因?
- 22.GH生成大量Surface速度非常慢怎么办?
- 23.如何在曲线上指定点的两侧找等弧长对称点?
- 24.两个树形数据之间运算必须保证组数完全一致吗?
- 25.Isotrim无法对目标曲面进行正确网格划分是什么原因?
- 26.如何做异形曲面的网架结构?
- 27.如何用GH提取并计算一张图片中的颜色比例?
- 28.如何将Excel的内容导入GH?
- 更新日志
- 下载声明
- 联系作者