# 1. 自瞄算法
|  |
| :----------------------------------: |
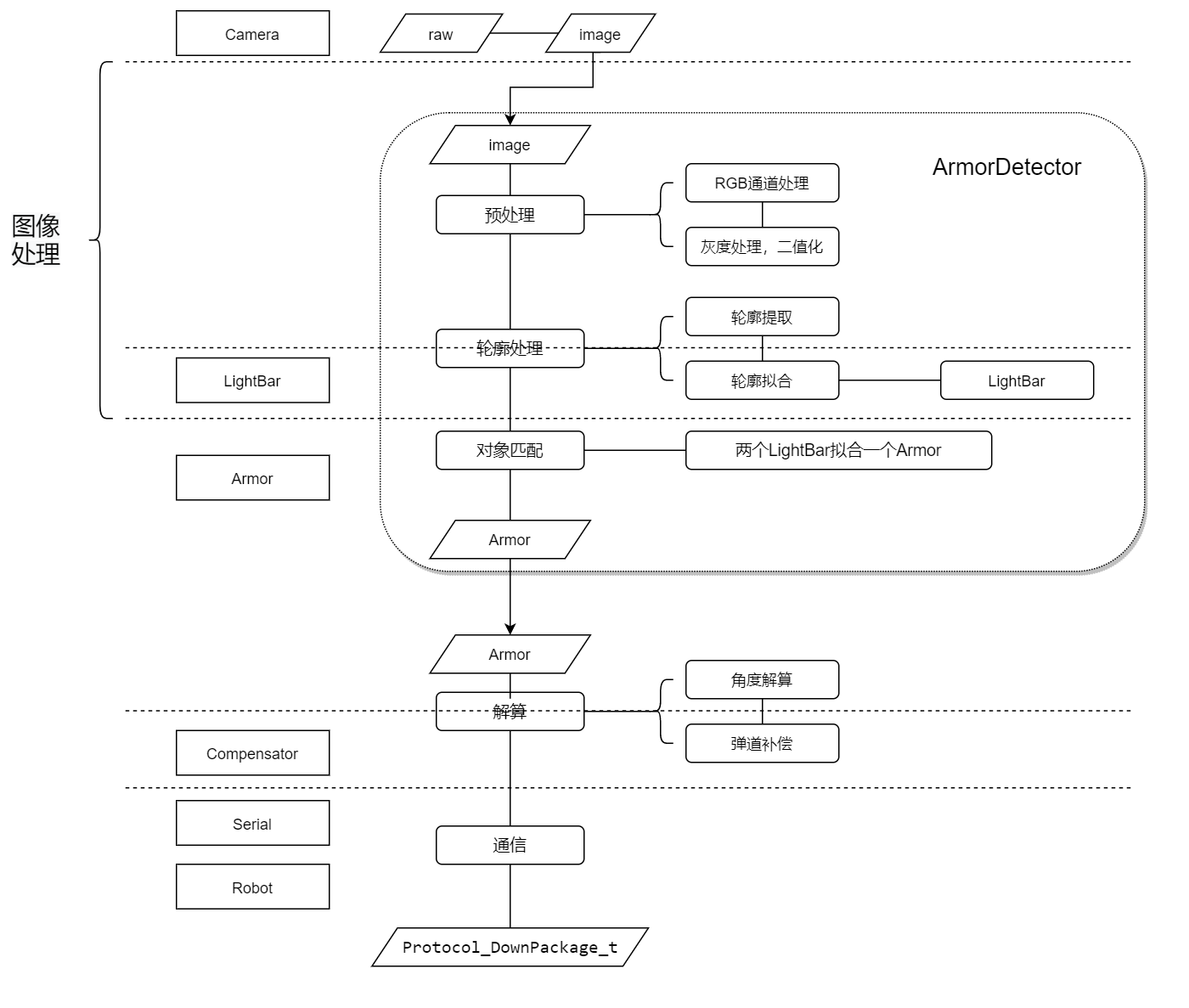
| *自瞄流程图* |
1. 预处理。根据队伍不同来进行不同颜色通道相减操作,目的是在图像中凸显出灯条,然后进行二值化处理来增强灯条和去除噪点,用拿到的二值化图像做开运算进一步去除图像噪点,最后提取得到的轮廓。
2. 根据轮廓寻找灯条。依次通过轮廓面积在整张图象中所占比例、轮廓最小外接矩形的倾斜角度、最小外接矩形面积在整张图像中所占比例、最小外接矩形长宽比这些参数来筛选出可能的灯条。将它们保存起来,并根据坐标位置从左到右进行排序。
3. 匹配灯条得到装甲板。对上一步得到的潜在的灯条做一个二重遍历,每次拿出两个不同灯条,根据其角度差异、倾斜方向是否为同侧、长度差异、高度差异、面积差异以及两灯条中心点距离等,若符合设定的参数要求,则可匹配得到一个装甲板。
