可以用于ROS开发的IDE很多,ROS的调试依赖环境变量,与外部程序有通讯,因此要求启动IDE的时候加载ROS环境参数,其他方面并无太多限制。
今天我们讲讲Qt Creator的安装与配置。Qt Creator是一个轻量级、配置起来也更方便简洁的ROS开发工具。
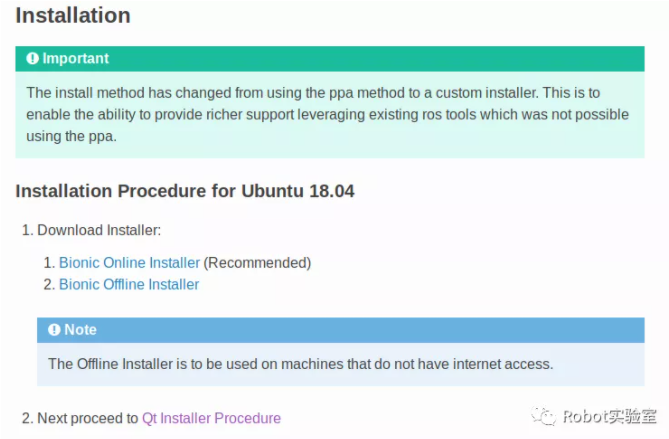
QtCreator的ROS插件虽然是一款插件,但是在其官网已经打包了一个QtCreator,也就是说插件和安装包是做在一起的,当你通过这个安装包安装成功后,QtCreator和ROS的插件将都安装成功。下载地址是(在**Robot实验室**公众号回复:qtros即可获得多个版本的百度网盘下载链接):
https://ros-qtc-plugin.readthedocs.io/en/latest/\_source/How-to-Install-Users.html#qt-installer-procedure
目前支持 14.04、16.04和18.04,目前不支持Ubuntu 20.04。这里我们下载Ubuntu 18.04的离线软件包:
:-: 
现在我们安装这个软件包:
1. 打开一个终端,可以使用Alt+Ctrl+T,使用cd命令路径到存放软件的地方;
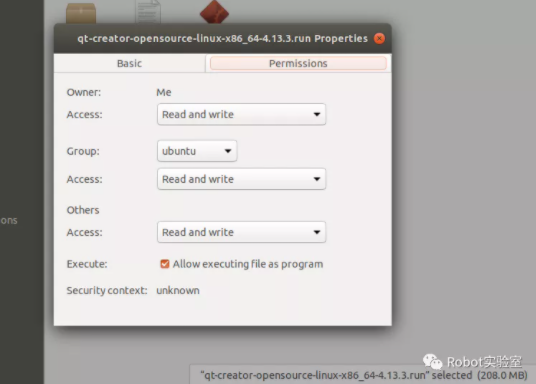
2. 执行chmod +x qtcreator-ros-bionic-latest-offline-installer.run 修改权限。也可以用鼠标右击此文件,选择Properties,将‘权限’中的‘执行’打勾;
:-: 
3. 执行 ./qtcreator-ros-bionic-latest-offline-installer.run开始安装(或者双击运行);
:-: 
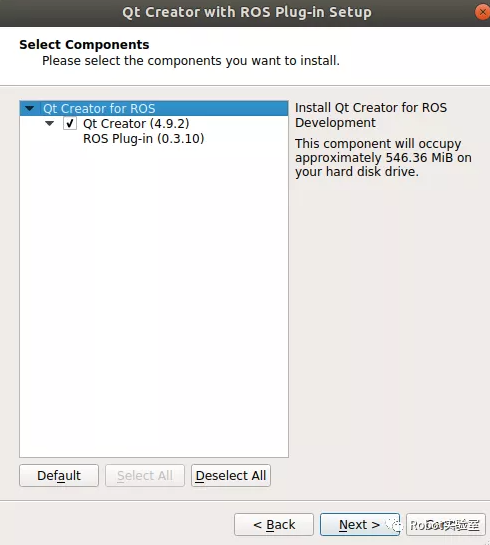
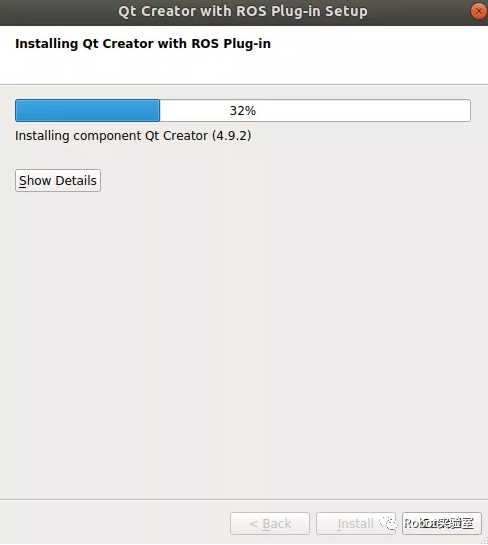
4. 选择安装路径,勾选 Qt Creator,然后点击继续;
:-: 
:-: 
5. 安装成功后,可以点击桌面左上角,搜索Qt就可以找到图标,双击运行即可打开软件;
:-: 
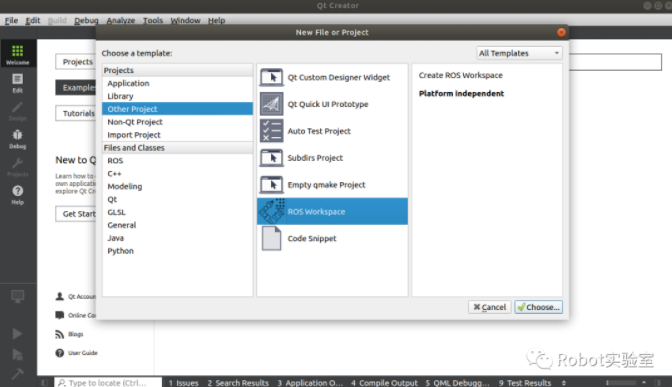
我们可以点击 File 》 new File or Project,点击Other Project,我们可以在左边看到 ROS Workspace,这里我们可以导入创建好的ROS工作空间;
:-: 
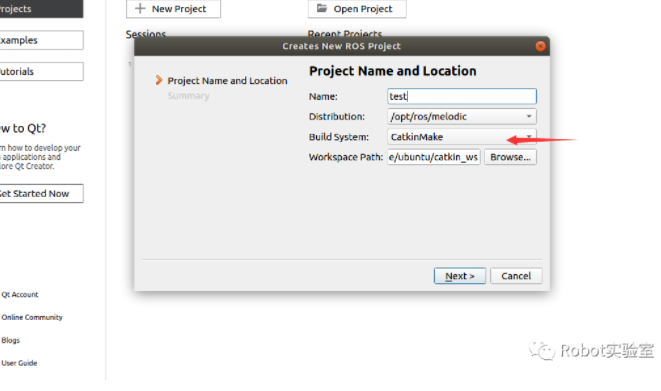
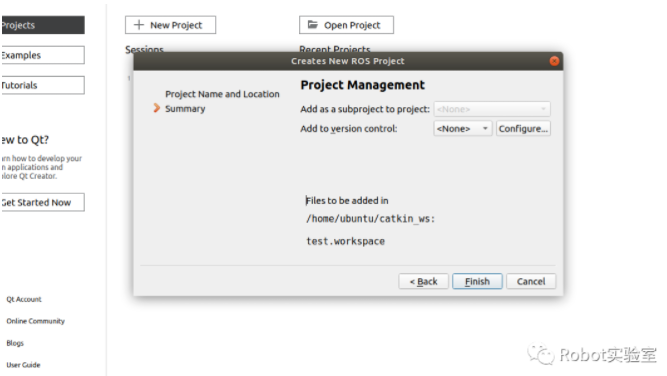
我们需要提前创建好ROS的工作空间(QtCreator无法创建工作空间,只可以导入),这里我创建的是catkin\_ws,选择catkin\_ws,然后写上一个自己喜欢的名字,这里我写的是test。将Build System选择为CatkinMake(如果采用beta版的Catkin\_tool才选为Catkintool编译);
:-: 
点击继续完成工作空间的导入;
:-: 
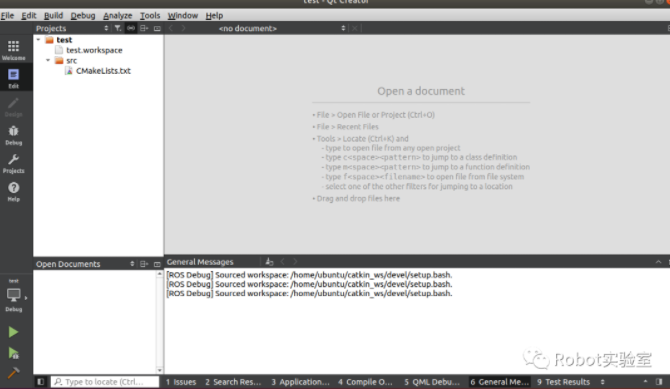
导入ROS工作空间成功的界面如下,于是可以通过qt creator方便的进行ROS开发啦 。如果在安装该插件的过程中有任何疑问,欢迎反馈交流!
:-: 
Enjoy it.
[机器人实验室 https://roboticslab.cn](https://roboticslab.cn/)
:-: 
