# 安装结果测试
## 针对ROS 1.0的安装结果测试
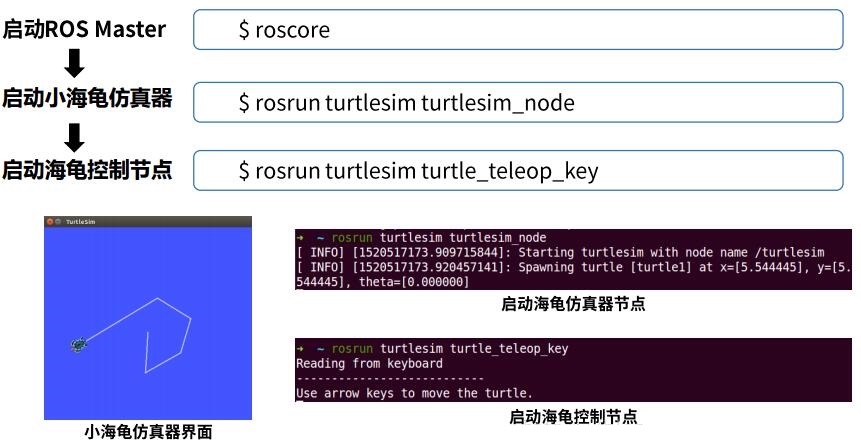
1. 新建一个终端,启动ROS的Master节点:
```
roscore
```
2. 新建一个终端,启动turtlesim的Node节点(节点启动成功后,你将在屏幕上看到一只小海龟):
```
rosrun turtlesim turtlesim_node
```
3. 新建一个终端,启动turtlesim的键盘控制节点(节点启动成功后,你将可以通过键盘的方向键控制小海龟移动):
```
rosrun turtlesim turtle_teleop_key
```
> 注:如果在执行的时候提示错误,有可能是因为turtlesim的仿真包没有安装,可以通过执行
> sudo apt-get install ros-[发行版本]-turtlesim
> 安装成功后再继续测试。可将**[发行版本]**替换为: kinetic melodic moetic。
<br>
Enjoy it.
[机器人实验室 https://roboticslab.cn](https://roboticslab.cn)
