
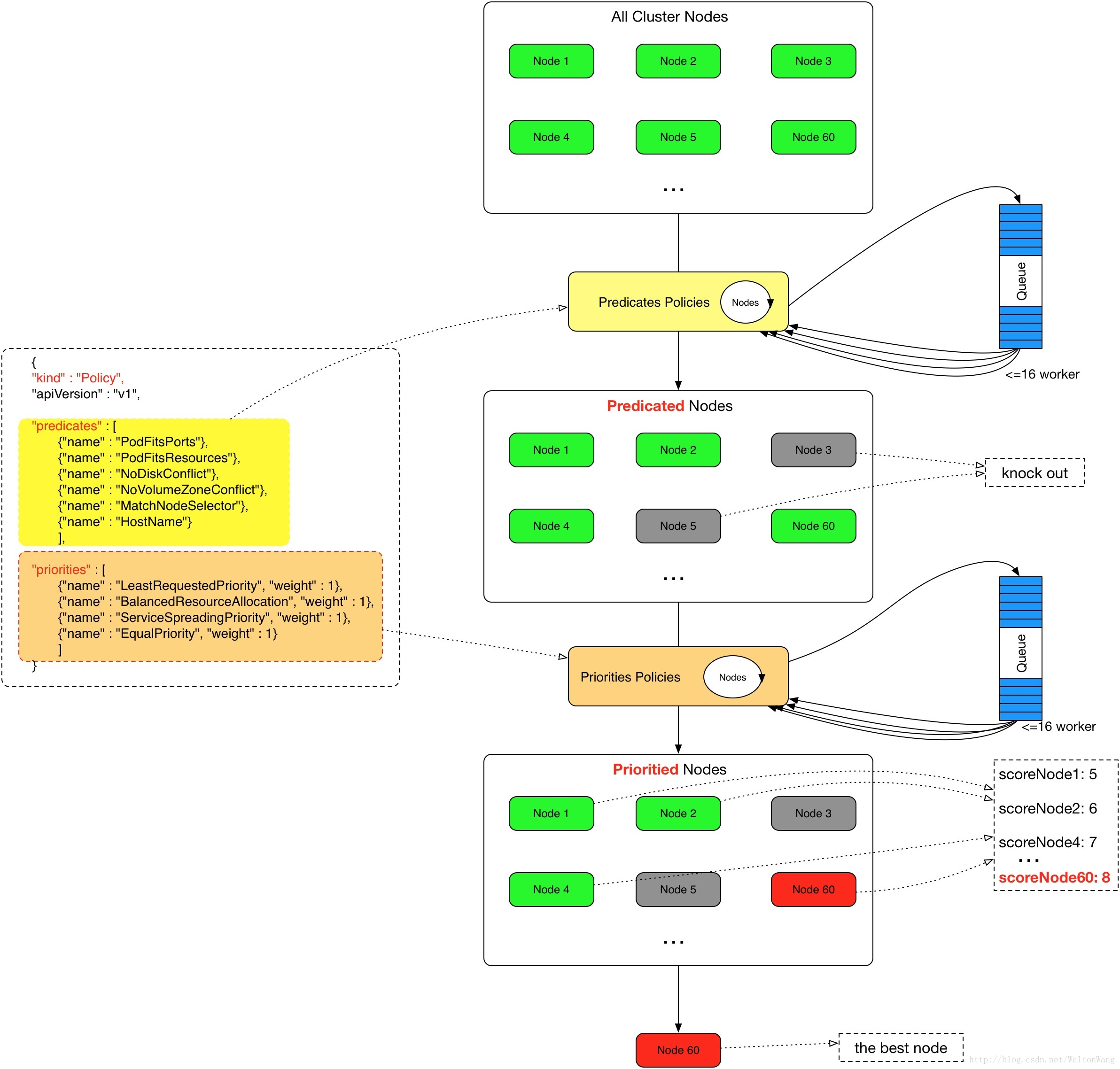
通过前面预选策略过滤出来的 Node 列表,会再一次使用优选策略为这些 Node 打分,最终得分最高的 Node 会作为该 Pod 的调度对象。
有多个优选策略就相当于有多个打分函数,那么总得分的计算公式为:`总分 = (打分函数1 * 权重1) + (打分函数2 * 权重2) + ... + (打分函数3 * 权重3)`,打分函数的打分范围为 0 - 10 分,0 表示非常不合适,10 表示非常合适。每个打分函数都可以配置对应的权重,默认权重值为 1,如果某个打分函数特别重要就可以增加该权重值。
常用的优选策略有:
* `LeastRequestedPriority`:选出空闲资源(CPU & Memory)最多的 Node
* `BalancedResourceAllocation`:主要用于资源平衡,选出各项资源分配最均衡的 Node,避免出现某些 Node CPU 被大量分配,而 Memory 大量剩余的情况
* `SelectorSpreadPriority`:为了更好容灾,对属于同一个 Service 或是 RC 的多个 Pod 副本,尽量调度到多个不同的 Node 上
* `InterPodAffinityPriority`:优先将 Pod 调度到相同的拓扑上(如同一个节点、Rack、Zone 等)
* `NodeAffinityPriority`:优先调度到匹配 NodeAffinity 的 Node 上
* `TaintTolerationPriority`:优先调度到匹配 TaintToleration 的 Node 上
* `ImageLocalityPriority`:优先选择已经存在 Pod 所需 Image 的 Node(已注册但默认未使用)
* `MostRequestedPriority`:优先选择已经使用过的 Node,适用于 cluster-autoscaler(已注册但默认未使用)
因此`kube-scheduler`算法流程图如下所示:
- Pod 基本用法
- Pod 简介
- 操作 Pod
- 创建 Pod
- 标签
- 标签选择器
- 命名空间
- 删除及更新 Pod
- 副本集(RS)、后台支撑服务集(DaemonSet)、任务(Job)
- 副本集(RS)
- 后台支撑服务集(DaemonSet)
- 任务(Job)
- 使用 ConfigMap 配置应用程序
- ConfigMap 简介
- 创建 ConfigMap 资源对象
- 通过 YAML 配置文件方式创建
- 通过 kubectl 命令行方式创建
- 通过生成器创建 ConfigMap
- 在 Pod 中使用 ConfigMap
- 通过环境变量方式使用 ConfigMap
- 通过卷挂载(volumeMount)方式使用 ConfigMap
- 使用 Secret 传递敏感数据
- Secret 简介
- 默认令牌 Secret
- 创建 Secret
- 使用 kubectl 创建 Secret
- 使用 YAML 文件手动创建 Secret
- 使用生成器创建 Secret
- 使用 Secrets
- 挂载 Secret 到 Pod 中作为卷进行使用
- 使用 Secret 作为环境变量
- 使用镜像拉取 Secret(ImagePullSecrets)
- 多容器 Pod
- 多容器 Pod 简介
- Pod 中容器间的通信
- Pod 容器共享 Volume
- 进程间通信(IPC)
- 容器间网络通信
- Scheduler
- kube-scheduler 简介
- kube-scheduler 职责及调度流程
- 常用参数
- 预选策略(Predicates Policies)
- 优选策略(Priorites Policies)
- 自定义调度器
- 使用 Deployment 进行 Pod 升级回滚
- Deployment 简介
- Deployment 的升级
- 多重更新(Rollover)
- 更新 Deployment 的标签选择器(Label Selector)
- Deployment 的回滚
- Deployment 的暂停与恢复
- Pod 扩容与缩容
- 手动扩缩容
- 自动扩缩容
- 扩缩容算法
- php-apache 自动扩缩容实例
- 配置 HPA
- v1 版本
- v2beta2 版本
- DaemonSet
- DaemonSet 简介
- 运行示例程序
- 滚动更新
- StatefulSet
- StatefulSet 简介
- 运行 nginx 实例
- 扩缩容 StatefulSet
- 更新 StatefulSet
- 删除 StatefulSet
- 非级联删除
- 级联删除
- Pod 管理策略
- Service 基本用法
- Service 简介
- Service 的类型
- 使用命令创建服务
- 使用 YAML 文件创建服务
- Service Discovery
- 环境变量
- DNS
- ClusterIP Service
- ClusterIp Service 简介
- Normal Service
- YAML 文件模板
- 服务负载分发策略 & 多端口服务 & 端口命名
- 一个简单的例子
- Headless Service
- 无 Selector 的服务
- NodePort Service
- NodePort Service 简介及实例
- 扩展:客户端直接访问 Pod
- hostPort
- hostNetwork
- Port Forward
- LoadBalancer与ExternalName
- LoadBalancer Service 简介
- LoadBalancer Service 实例
- 使用 nginx 软件手动实现负载均衡
- 由云服务商提供负载均衡器
- ExternalName Service 简介
- Ingress
- Ingress 简介
- 部署 nginx-ingress-controller
- 部署一个简单的 Nginx 实例
- 不同的 Ingress 策略配置类型
- 配置 Ingress 处理 TLS 传输