
# EAIDK-610快速上手手册
## 1. 开箱

> 箱内包含:
> - 主板 1
> - Type-C 线缆 1
> - 电源适配器 1
## 2. 进入系统
> 默认账户名为 openailb
> 默认密码为 openailab
## 3. 接入网络(建议有线网络连接)
#### 方法1:有线网络连接
将网线插入主板上的网线接口即可
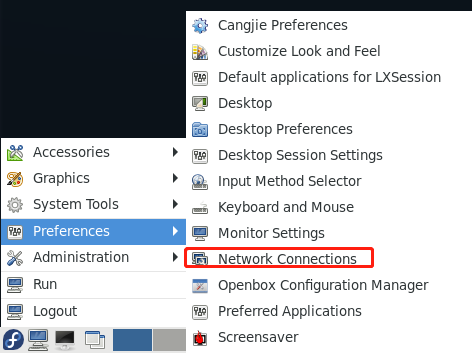
#### 方法2:无线网络连接
将鼠标键盘插入主板上的USB接口
电机开始菜单-Preferences-Network Connections,添加新的无线网络连接
## 4. 查看EAIDK-610 IP地址
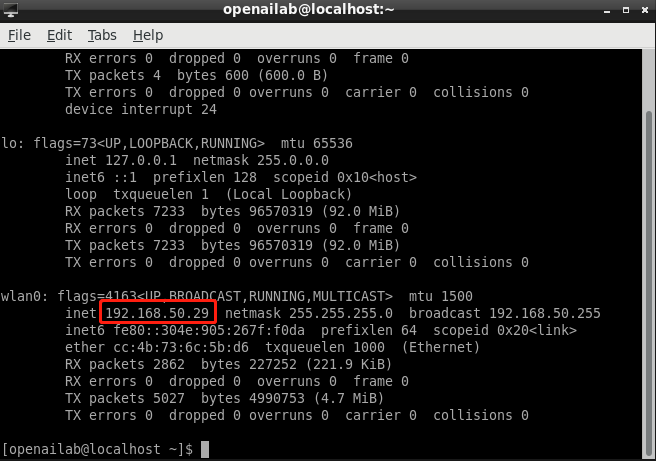
> 点击EAIDK-610桌面开始按钮旁边的按钮,唤醒一个新的终端
> 在终端中输入 ifconfig
> 可以看到显示类似如下的信息,其中红色框选住的即为EAIDK-610的IP地址。
> IP地址在后文的远程连接以及案例运行中需要使用到。
> 
## 4. 远程连接
> 使用Windows系统携带的远程桌面连接功能,远程控制EAIDK-610芯片
> 操作步骤
> - 按下 Win+R,输入 mstsc,按下回车
> - 在**计算机**这一栏输入EAIDK-610的IP地址,点击连接
> - 在弹出的远程连接界面中,输入EAIDK-610的用户名和密码(默认都为openailab)
> - 点击**OK**,即可进入远程桌面
> 
## 5.换源
> EAIDK-610系统镜像中的软件源连接不稳定,所以我们需要把默认的软件源更改掉。
> 操作步骤
> - 将资料包中的**替换源文件**内的4个文件复制到EAIDK-610的桌面
> 
> - 打开一个新的终端

> 
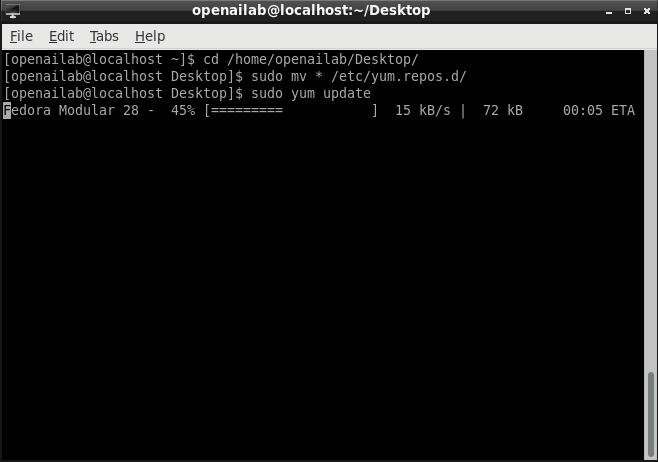
> - 依次输入以下命令,并在弹出Is thar ok时,输入n,避免浪费太多时间
> cd /home/openailab/Desktop
> sudo rm /etc/yum.repos.d/*
> sudo mv * /etc/yum.repos.d/
> sudo yum update
> 
## 6.安装python及其依赖库
> EAIDK-610平台在与IOA的协同运行中,以python脚本程序的形式去运行控制器相关逻辑程序以及图像处理程序,所以需要安装相应的软件包以及依赖库
> 操作步骤
> - 打开一个新的终端
> - 依次输入以下命令
> sudo python3 -m pip install --upgrade pip
> sudo pip3 install modbus_tk imutils
> sudo dnf install python3-opencv-3.4.1-1.fc28.aarch64
## 7. 验证是否安装成功
> 操作步骤
> - 打开一个新的终端
> - 依次输入以下命令
> python3
> import modbus_tk
> import imutils
> import cv2
> - 若不报错,即为安装成功,否则检查之前步骤,并重试
## 8. 案例运行(未特别注明的均为在EAIDK-610上的操作)
此部分,可在EAIDK-610案例使用使用手册中看到更详细的解释
> - 将资源包内的code文件夹放在EAIDK-610的桌面上
> - 打开code文件夹内的案例程序(code文件夹内有两个.py文件,其中一个为IOA_Driver.py为驱动文件,另外一个.py文件即为案例程序文件)
> - 在代码中寻找 camera = Camera(),
> 将其替换为 camera \= Camera(server\_ip\="IOA虚拟仿真引擎所在PC的IP地址")
> - 在代码中寻找 controller = Controller(port=9999)
> 将其替换为 controller \= Controller(host\="EAIDK-610所在IP地址",port\=9999)
> --------------------------------
> 例如,IOA虚拟仿真引擎所在PC的IP地址为 192.168.50.3,EAIDK-610所在的IP地址为192.168.50.29
> 那么替换后的内容为:
> camera \= Camera(server\_ip\="192.168.50.3")
> controller \= Controller(host\="192.168.50.29",port\=9999)
> --------------------------------
> - 保存文件
> - (PC端)打开IOA场景
> - 打开一个新的终端,输入
> python3 文件路径/文件名
> --------------------------------
> 例如,案例程序文件名为 shapeDetection.py,则输入
> python3 /home/openailab/Desktop/code/shapeDetection.py
> --------------------------------
> - (PC端)将控制器IP地址改为EAIDK-610所在IP地址
> - (PC端)连接控制器
> - (PC端)点击运行
- 欢迎使用IOA数字孪生
- IOA-更新与安装
- 软件注册与安装
- 软件使用协议
- 注册与使用
- (一)、认识IOA基础界面功能
- UI界面与设置
- 软件环境设置
- 三维导航操作
- 3D导航球使用
- 快捷键与仿真
- (二)、三维场景搭建
- 3D设计视频教程
- 坐标及旋转
- 模型参数设置
- 模型树与拼接
- 从SolidWorks到IOA放置的模型自制
- IOA辅助工具
- (三)、虚拟电气与调试
- 虚拟电气信号归类
- 虚拟接线与导出
- (三)、虚实控制与编程
- 西门子PLC的仿真与控制
- 西门子实体PLCS7-1214控制器的添加与控制
- 西门子虚拟PLCS7-1214控制器的添加
- 西门子PLCS7-1512控制器的添加
- 三菱PLC的仿真与控制
- 三菱PLC仿真器的使用说明
- 三菱PLC的添加与说明
- 工业机器人(纳博特)仿真
- 工业机器人(KEBA)仿真
- 工业机器人(埃夫特)仿真
- 协作机器人(遨博)仿真
- 运动控制(ZMC308)正运动仿真
- 机器视觉(VPLC516)正运动仿真
- 微型机器人(开塔)仿真
- Py-teach快速编程仿真
- 人工智能视觉仿真
- 单片机接入与仿真控制
- Mixly-UNO_S虚拟工厂SDK
- Mixly-MEGA_S虚拟工厂SDK
- Mixly-ESP32虚拟工厂SDK
- 树莓派与Python仿真
- (四)、自定义控制器添加
- modbus-tcp自定义控制器
- (五)、Py-teach模块化编程示教
- Py-teach软件使用
- 语法与编程
- py-teach快速编程在线教程
- (六)、SDK与二次开发
- modbus-tcp自定义控制器SDK
- 机器视觉开发SDK
- EAIDK-610固件烧录手册
- EAIDK-610快速上手手册
- EAIDK-610案例使用手册
- (七)、快速上手案例教程
- 西门子PLC虚实仿真公开课
- 纳博特工业机器人虚实仿真
- 三菱PLC虚实仿真
- (八)、XR多人互动
- (九)、问题归总
- (十)、IOA硬件虚实仿真导航
- IOA虚实控制器及案例下载
- 虚实控制器资源包
- 机器视觉与人工智能