
## **1.4 章节内容一览(Chapter Content Overview)**
:-: **本节导航**
[TOC=3,3]
*****
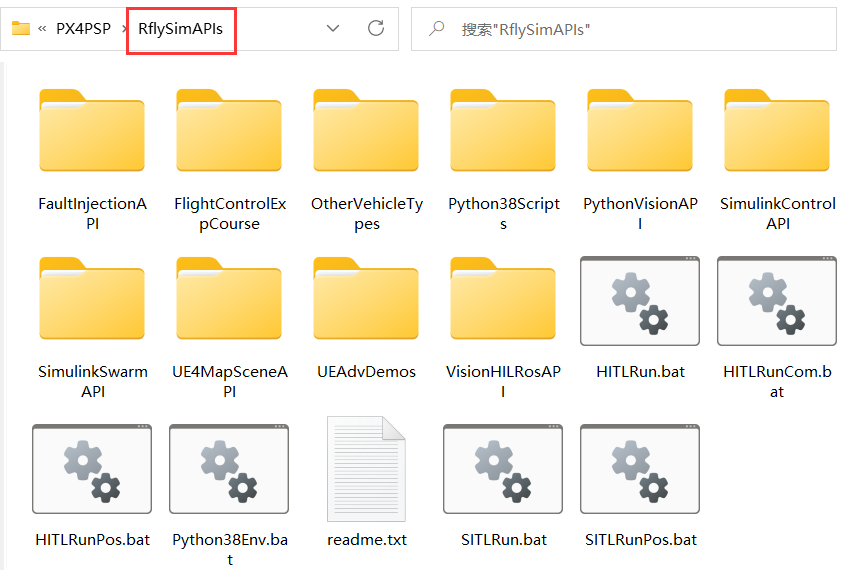
### 4.1 API文件夹一览(API Folder Overview)
如下图是安装目录(默认在C:\\PX4PSP)下的`RflySimAPIs`文件夹,包含了本平台所有的源码和例程来展示各种API接口的使用方法
****
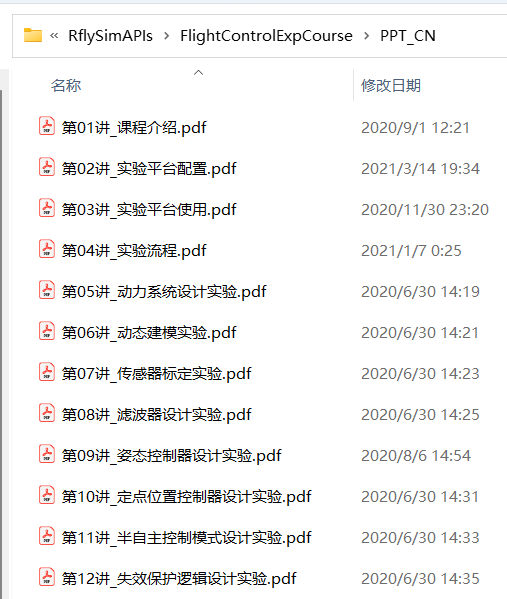
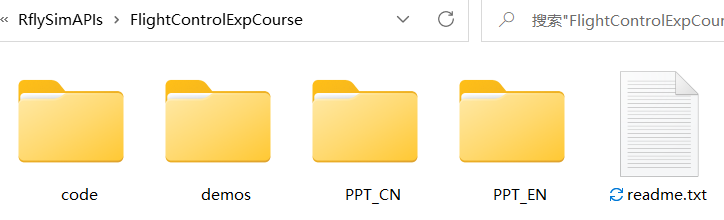
### 4.2 飞行控制算法开发课程的学习(Flight control algorithm development course)
* “RflySimAPIs\\FlightControlExpCourse”文件夹是通过Simulink控制算法开发、自动代码生成、硬件在环仿真、真机实验的一套飞控算法快速开发课程,也是《多旋翼飞行器设计与控制实践》一书的实验包,可以查看教程的“RflySim高级版\_第02讲\_飞行控制算法开发.pdf”来学习使用方法。
>[info]注: 例程的demos中还包含了多个基础实验,一个ADRC控制器设计的例子(见ADRCDemo文件夹),和一个替换官方模块(EKF滤波、姿态控制、顶层航路等)的教程(见ReplacePX4Module文件夹)
****
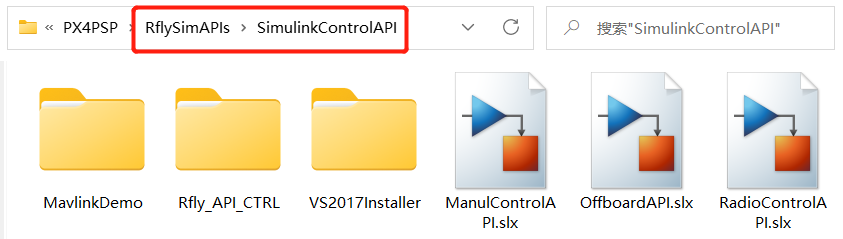
### 4.3 外部单机控制接口(Offboard等)的使用(Use of external single machine control interface (Offboard, etc.))
* “RflySimAPIs\\SimulinkControlAPI” 文件夹是通过Simulink控制单机HIL仿真系统( CopterSim + Pixhawk )的接口程序,可以查看教程的“RflySim高级版\_第03讲\_单机控制接口实现.pdf”来学习使用方法。
****
### 4.4 扩展到其他机型(旋翼 、固定翼、垂直起降、无人车等)(Extended to other models (rotor, fixed wing, vTOL, unmanned vehicle, etc.))
* “RflySimAPIs\\OtherVehicleTypes” 文件夹是介绍将自己的Simulink模型导入到CopterSim中以实现固定翼、无人车等其他机型的仿真。目前包含多旋翼、固定翼、无人车等通用模型例程,可以查看其中的“RflySim高级版\_第04讲\_其他机型的开发.pdf”来学习使用方法。
****
1) 如何仿真其他多旋翼机型
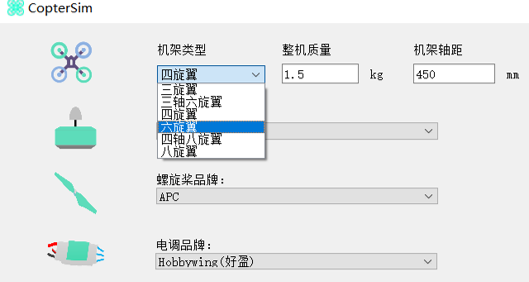
模型端改为六旋翼,并选择合适配置
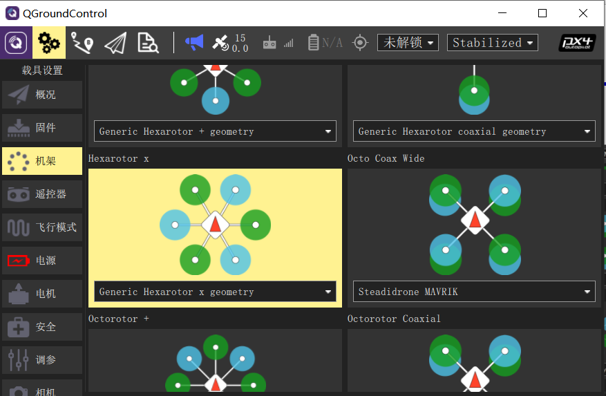
飞控端选择六旋翼机架,并开启HITL
>[info]注意:详细步骤请看后续章节内容,这里只需了解功能即可,不需要实验复现
****
* RflySim:如何仿真其他的多旋翼机型, 例如六旋翼
本视频观看地址:
* 优酷: https://v.youku.com/v_show/id_XNDcwNjA4MDY2MA==.html
* YouTube : https://youtu.be/bryZXxaJE5M
* B站: https://www.bilibili.com/video/BV13a411i7sH?p=2

****
2)如何仿真固定翼、无人车等其他机型
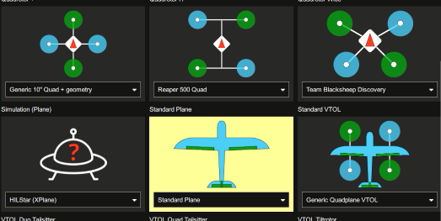
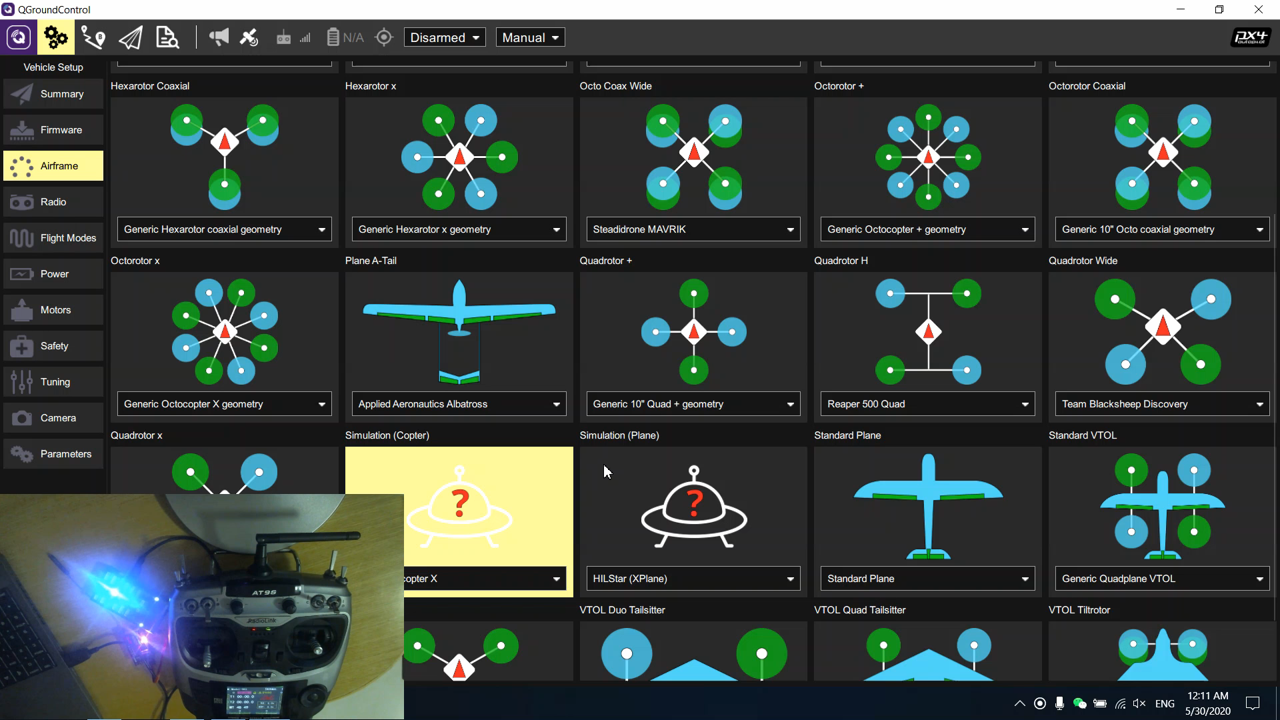
1\. QGC改Pixhawk为固定翼模式
2\. Simulink模型固定翼模型代码生成DLL文件
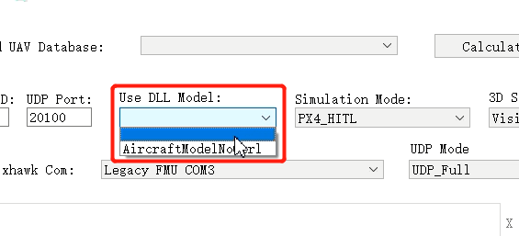
3\. CopterSim使用固定翼DLL文件进行仿真
4\. RflySim3D自动切换固定翼三维
>[info]注意:详细步骤请看后续章节内容,这里只需了解功能即可,不需要实验复现
****
* RflySim: 如何仿真其他机型,例如固定翼飞行器
本视频观看地址:
* 优酷:https://v.youku.com/v_show/id_XNDcwNjA4MTQxMg==.html
* YouTube : https://youtu.be/gt7lIUx7JRc
* B站: https://www.bilibili.com/video/BV13a411i7sH?p=3
****
### 4.5 在RflySim3D中通过UE4搭建你自己的三维场景与飞机模型(Build your own 3D scenes and airplane models with UE4 in RflySim3D)
* “RflySimAPIs\\UE4MapSceneAPI” 文件夹是自行设计并导入UE4高逼真场景和飞机三维模型的文档与例程,可以查看教程“RflySim高级版\_第05讲\_UE4三维场景开发.pdf”来学习使用方法。
****
### 4.6 视觉控制接口使用(Visual control interface is used)
* “RflySimAPIs\\PythonVisionAPI” 文件夹是通过Python实现视觉闭环控制的接口例程文档,可以查看教程“RflySim高级版\_第06讲\_视觉控制算法开发.pdf”来学习使用方法。
****
### 4.7 集群控制接口的使用(Use of cluster control interfaces)
* “RflySimAPIs\\SimulinkSwarmAPI” 文件夹是Simulink控制多机集群的接口例程,可以查看教程“RflySim高级版\_第07讲\_集群控制算法开发.pdf”来学习使用方法。
****
### 4.8 基于UE高级版的全球大场景例程(Global large scene routines based on UE Advanced edition)
* “RflySimAPIs\UEAdvDemos” 文件夹(仅限于完整版)是基于最新版UE(目前是4.27,即将更新UE5)和Cesium开发的RflySim3DNew版引擎,是RflySim3D引擎的升级版,可以查看教程“UE高级版场景地图测试流程.docx”来学习使用方法
****
### 4.9 基于Linux/ROS的嵌入式视觉硬件在环开发(Development of embedded visual hardware in loop based on Linux/ROS)
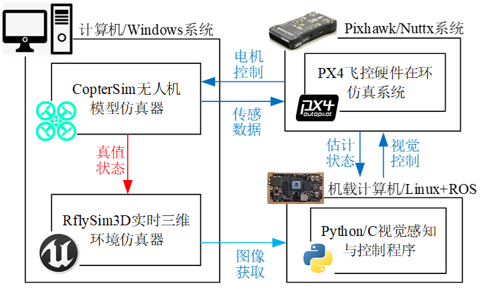
* “RflySimAPIs\VisionHILRosAPI” 文件夹(仅限于完整版)是视觉例程的进阶版,可以通过RflySim3D将视觉图像传到Linux机载计算机上,进行ROS与视觉算法的联动,实现多机视觉的分布式仿真。使用方法见“VisionHILRosAPI\readme.docx”
****
### 4.10 故障注入与安全测试算法开发(例程完善中)(Fault Injection and Safety Testing algorithm development (routine improvement))
* “RflySimAPIs\FaultInjectionAPI” 文件夹是基于DLL模型生成与导入功能的故障用例实时注入与测试接口,可以通过Python或Simulink在软/硬件在环仿真时,注入特定的故障(电机、磁罗盘、风干扰等),用于测试算法在故障情况下的可靠性。使用方法见“RflySimAPIs\FaultInjectionAPI\readme.txt”。可以查看本教程的《第八讲 故障注入与安全评估》来学习使用方法。
****
### 4.11 高级完整版(收费功能)视频展示(Advanced full version (charging function) video display)
* 视频1:多固定翼跑道自动起飞与航路硬件在环仿真测试
https://v.youku.com/v_show/id_XNTgwMjgzODU0MA==.html
* 视频2:全球指定场景的硬件在环仿真(长沙为例)
https://v.youku.com/v_show/id_XNTgwMjgzODY2NA==.html
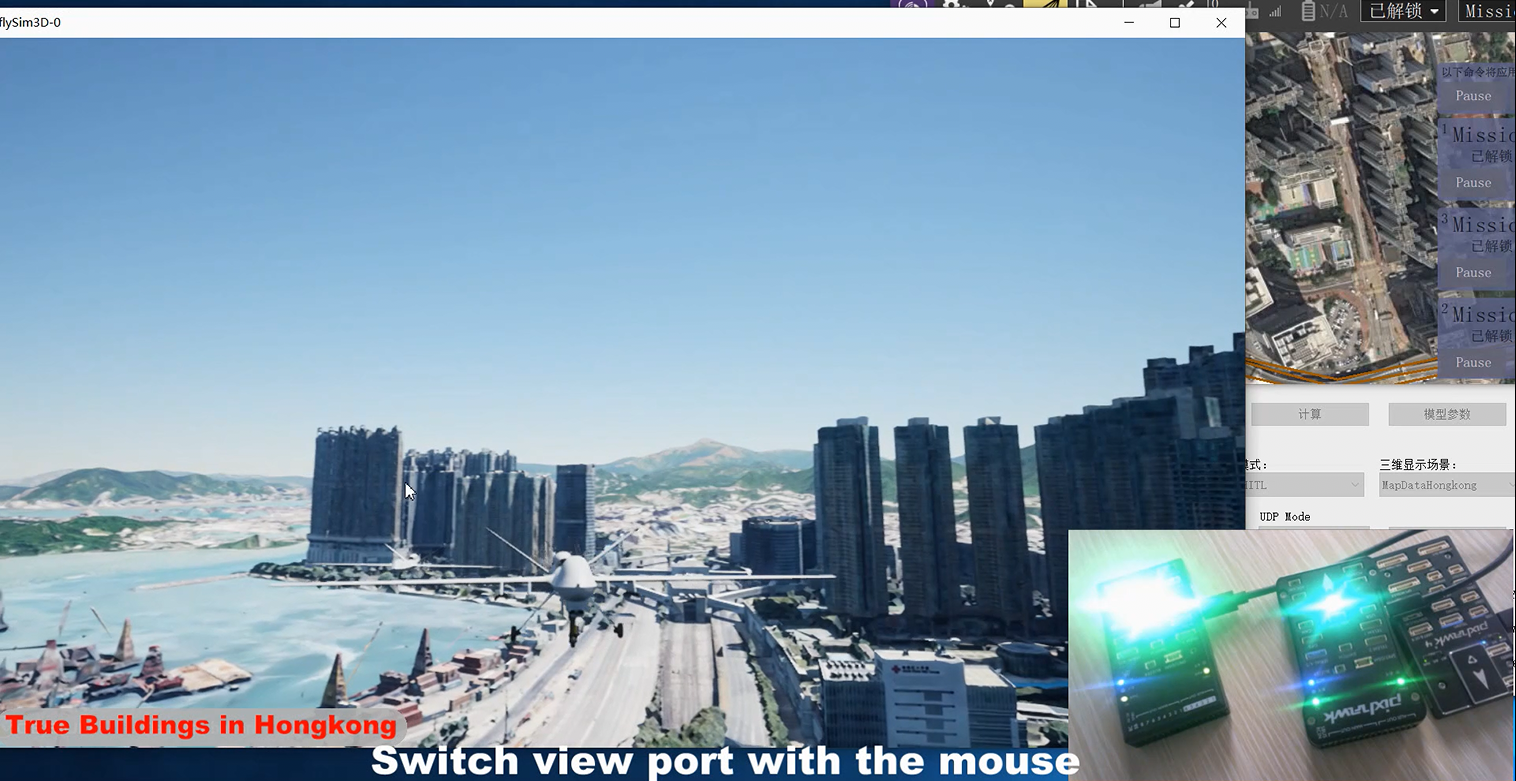
* 视频3:数字孪生&虚拟现实,香港城市地图导入与单机硬件在环测试
https://v.youku.com/v_show/id_XNTgwMjgzODg2NA==.html
* 视频4:香港城市地图楼间穿越集群飞行测试
https://v.youku.com/v_show/id_XNTgwMjgzOTEyNA==.html
* 视频5:带视觉的多机集群硬件在环仿真测试系统
https://v.youku.com/v_show/id_XNTgwMjg0MTY0NA==.html
****
****
- RflySim平台简介
- 第一讲 平台安装与使用简介
- 1.1 平台安装
- 1.2 软件使用与配置
- 1.3 硬件使用和配置
- 1.4 章节内容一览
- 1.5 未来功能展望
- 第二讲 飞行控制算法开发
- 2.1 课程学习
- 2.2 基础实验
- 2.3 进阶实验
- 2.4 代码生成讲解
- 第三讲 单无人机自动控制开发
- 3.1 软硬件配置
- 3.2 MAVLink通信解析
- 3.3 PX4官方控制器通信
- 3.4 代码生成控制器通信
- 第四讲 其他机型的建模与开发
- 4.1 软硬件配置
- 4.2 其他多旋翼
- 4.3 自定义固定翼
- 4.4 自定义模型
- 4.5 三维模型开发
- 第五讲 三维可视化场景开发
- 5.1 安装方法
- 5.2 UE4三维场景制作
- 5.3 RflySim3D三维场景导入
- 5.4 飞机三维模型建立与导入
- 5.5 场景内物体的轨迹控制
- 5.6 进阶功能
- 第六讲 视觉AI控制算法开发
- 6.1 安装使用方法
- 6.2 基础接口使用
- 6.3 单目视觉控制例子
- 6.4 双目视觉控制例子
- 6.5 视觉穿环例子
- 6.6 其他视觉例子
- 6.7 Mavros通信测试
- 第七讲 集群控制算法开发
- 7.1 平台构架与使用
- 7.2 Simulink集群接口示例
- 7.3 Simulink集群控制进阶
- 7.4 Python集群接口示例
- 7.5 集群高级功能
- 第八讲 故障注入与安全评估
- 8.1 软硬件配置
- 8.2 故障注入原理
- 8.3 基于UI的故障注入
- 8.4 基于参数的故障注入
- 8.5 基于FPGA平台的故障注入
- 第九讲 集群组网通信仿真与开发
- 第十讲 平台常见问题与解决方法