

【节点说明】
此节点将包含视图和投影的摄像机添加到3D图层。在层级结构中添加一个摄像机节点可以创建一个虚拟摄像机。它有两个属性组来分别设置投影和视图的相关参数。它们共同定义了摄像机的特性。
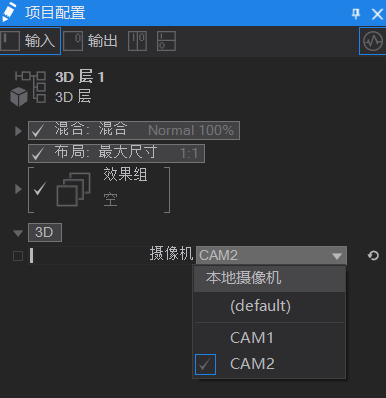
虽然可以定义多个摄像头,但每个3D图层只有一个摄像头处于活动状态。可以在选择该节点时通过“ 属性编辑器”底部的“ 激活摄像机(Activate Camera)”按钮将其设置为活动状态。

活动相机标有红点,如下图:

在摄像机所在图层的属性编辑器中,可以在多个摄像机之间进行切换或插值。
【属性参数】
**投影(Projection)**
投影模拟了视角缩短的效果(即较远的物体看起来较小)。
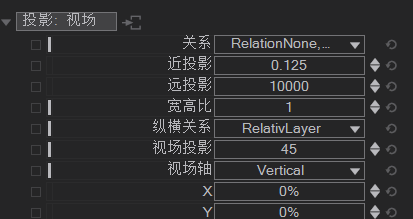
视场和正交具有中心(Center)输入特性X和Y,可用于转移投影的中心。投影还指定近(Near)平面和远(Far)平面,它们定义最近和最远点的Z值。
视场由视野椎体的两个相对侧之间的角度限定。在视场投影的输入属性指定角度,视场轴指定是左和右(水平)或顶部和底部(垂直)两侧。根据宽高比和纵横关系属性自动计算其他两边之间的角度。
>[danger] 【注】如果场景中没有摄像机节点,将使用默认投影,该投影相当于45度视野投影,其长宽比显示在项目属性中设置的输出分辨率中。
正交是一种特殊的投影,显示时没有透视缩短。它通常用于示意图或其他透视缩短会令人困惑的情况。输入属性“宽度(Width)”和“ 高度(Height)”,定义渲染输出中显示的3D空间体积的宽度和高度。正交投影基本上将该体积直接从世界/视野空间中切出并沿Z轴展平。
矩阵可用于设置或连接自定义投影矩阵。自定义矩阵可以手动计算或由第三方设备传送。
**视图(View)**
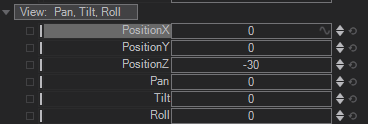
视图矩阵负责模拟虚拟摄像机的位置和方向。Camera Node具有不同的功能来设置视图矩阵:
Pan,Tilt,Roll具有位置和方向属性。因此,相机可以放置在具有X,Y和Z位置的3D世界中,然后像真实相机一样平移,倾斜和滚动。
**设计视点Eyepoint**
有时可能需要独立于相机的实际位置进行照明。特别是投影映射设置需要能够为渲染点和观察者提供不同的位置。这是因为需要从投影仪的位置渲染场景,以便将其正确映射到投影的屏幕上。但仍然需要从Eyepoint来计算场景的镜面反射点和反射,例如屏幕前的观众。当使用多个投影仪时,这会变得更加明显,每个投影仪都会产生不同的镜面反射。
设计视点可以附加到位于查看器位置的场景中的锚点。现在,无论活动摄像机的位置在哪,所有着色器都将使用该位置作为摄像机位置以进行照明。
- ▲必看:本文档迁移通知▲
- 更新日志及目录
- 1 产品介绍
- 2 安装准备
- 2.1软硬件要求
- 2.2安装说明
- 2.2.1 工具设计端
- 2.2.2 工具播放端
- 2.3创建项目
- 2.3.1字体设置
- 3 界面
- 3.1主界面工作区
- 3.1.1标题栏
- 3.1.2渲染菜单
- 3.1.3项目菜单
- 3.1.4 场景
- 3.1.5 视图
- 3.2 层编辑器
- 3.3 层级编辑器
- 3.3.1渲染顺序
- 3.3.2层级编辑器工具栏
- 3.3.3插入节点
- 3.3.4选中节点
- 3.4 内容编辑器
- 3.5 文本编辑器
- 3.6 项目属性配置
- 3.6.1暴露属性
- 3.7 工具箱
- 3.7.1快捷工具箱
- 3.8 渲染窗口和预览菜单
- 3.8.1 渲染编辑模式
- 3.9 动画编辑器
- 3.10 消息窗
- 4 基础节点
- 4.1 世界节点
- 4.1.1 坐标系
- 4.1.2 锚点
- 4.1.3 公告板
- 4.1.4 容器
- 4.1.5 摄像机
- 4.2 文本节点
- 4.2.1 2D文本
- 4.2.2 2D文本样式
- 4.2.3 文字效果
- 4.3 颜色/材质节点
- 4.3.1 Alpha
- 4.3.2 基础
- 4.3.3 天空盒子
- 4.3.4 雾效
- 4.4 动画节点
- 4.4.1 推动器
- 4.4.2 百分比控制
- 4.4.3 关键帧动画
- 4.5 几何形状节点
- 4.5.1 矩形
- 4.5.2 圆角矩形
- 4.5.3 渐变矩形
- 4.5.4 立方体
- 4.5.5 圆形
- 4.5.6 球体
- 4.5.7 模型加载器
- 4.5.8 路径
- 4.6 逻辑节点
- 4.6.1 计数器
- 4.6.2 脚本
- 4.6.3 函数插值效果
- 4.6.4 表达式
- 4.6.5 目录
- 4.7 交互节点
- 4.7.1 触摸按钮
- 4.8 层节点
- 4.8.1 层组
- 4.8.2 层切换
- 4.9 渲染选项节点
- 4.9.1 FX特效
- 4.9.2 过滤器
- 4.10 数据节点
- 4.10.1 文本文件
- 4.10.2 资源导入
- 4.10.3 Excel 工作簿
- 4.11 音频节点
- 4.11.1 音频
- 4.12 I/O 节点
- 4.12.1 键盘
- 4.12.2 鼠标
- 4.13 E2E 节点
- 4.13.1 E2E坐标系
- 4.13.2 E2E提供器
- 4.13.3 E2E层
- 4.13.4 E2E控制
- 4.13.5 E2E数据
- 5 RayData 场景效果节点
- 5.1 材质
- 5.1.1 金属
- 5.1.2 墙面
- 5.1.3 玻璃
- 5.1.4 路面
- 5.1.5 水面
- 5.1.6 山
- 5.2 绿化
- 5.2.1 树
- 5.2.2 草地
- 5.3 车流
- 5.4 线框
- 5.5 地面反射
- 5.6 窗户
- 5.7 背景
- 5.8 环境球
- 5.9 灯光
- 5.10 标记
- 5.11 连线
- 5.11.1 连线 01
- 5.11.2 连线 02
- 5.12 摄像头
- 5.12.1 2D 监控摄像头
- 5.12.2 3D 监控摄像头
- 5.13 云
- 5.14 中国地图
- 5.15 世界地图
- 5.16 地球
- 5.17 模型高亮
- 5.18 热力图
- 5.19 天气场景
- 5.20 扫线
- 5.21 地片生成
- 6 RayData UI节点
- 6.1 天气信息
- 6.2 雷达图
- 6.3 线图
- 6.4 柱状图
- 6.5 饼图
- 6.5.1 环形图
- 6.5.2 进度仪表盘
- 6.5.3 玉玦图
- 6.5.4 多环图
- 6.6 菜单按钮
- 6.7 散点图
- 6.8 监控视频
- 6.9 玫瑰图
- 6.10 条形轮播图
- 6.11 柱线组合图
- 6.12 标题框
- 6.13 天气图标
- 6.14 文字板
- 6.15 倒计时关闭
- 6.16 中文输入框
- 6.17 文本轮播
- 6.17.1 横向文本轮播
- 6.17.2 纵向文本轮播
- 6.18 矩形树图
- 7 RayData 逻辑节点
- 7.1 动画摄像机
- 7.2 动画控制
- 7.2.1 动画控制
- 7.2.2 三态动画
- 7.2.3 范围动画
- 7.3 3D 控制器
- 7.4 切换
- 7.5 循环切换
- 7.6 切换组
- 7.7 Remote 远程控制
- 7.8 Remote 3D 远程控制
- 7.9 颜色判断
- 7.10 场景内容自适应
- 7.11 数值开关
- 7.12 等差数列
- 7.12.1等差数列(差值)
- 7.12.2等差数列(总值)
- 7.13 弹窗切换器
- 7.14 数据轮播
- 7.15 轮播控制
- 7.16 刻度换算(简/全)
- 7.17 角度换算
- 7.18 折线转曲
- 8 RayData 数据节点
- 8.1 Json 解析
- 8.1.1 Json 加载
- 8.1.2 Json 打开
- 8.1.3 Json 排序
- 8.1.4 Json 取值
- 8.2 简单数据
- 8.2.1 数据源
- 8.2.2 JsonTable 解析
- 8.2.3 XML/Json 转换器
- 8.3 GIS定位
- 8.3.1 GIS坐标位置转换
- 8.3.2 定位点
- 8.3.3 轨迹线
- 8.4 API接口
- 8.4.1 简单接口
- 8.4.2 鉴权接口 01
- 8.4.3 鉴权接口 02
- 8.4.4 WebSocket 01
- 8.5 SHP 文件解析
- 8.6 数据类型转换
- 8.6.1 String 转 Double
- 8.6.2 String 转 Float
- 8.6.3 Float 转 Double
- 8.6.4 Double 转 Float
- 8.7 数值变化控制
- 9 模型制作
- 9.1场景模型要求
- 9.1.1比例尺
- 9.1.2场景模型层级
- 9.2 场景UV要求
- 9.2.1单栋建筑UV
- 9.2.2大面积简模UV
- 9.2.3树木以及路灯等细节UV
- 9.2.4道路与路牙UV
- 9.2.5河流的UV
- 9.2.6绿化片UV
- 9.2.7山体地形UV
- 9.3 效果模型
- 9.3.1车流模拟
- 9.3.2扫线模型
- 9.4 模型导出要求
- 9.4.1 FBX导出
- 9.4.2 OBJ导出
- 9.5 导入和导出工具的步骤
- 9.5.1导入
- 9.5.2导出
- 附录
- 基础教程英文版
- 软件基础
- 模型搭建
- 场景渲染
- UI制作
- 动画制作
- 逻辑搭建
- 数据接入
- 系统部署
- 基础教程中文版
- 工具基础
- 模型制作
- 原型分析
- 效果渲染
- 项目分享
- UI图表
- 逻辑搭建
- 数据处理
- Remote控制